Pepper - Wake up and Rest effect¶
See also
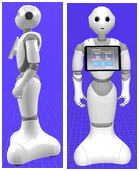
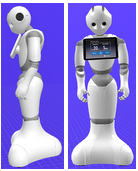
When the robot is on his wheels:
| Wake up ... | Rest ... |
|---|---|
|
|
Specific cases¶
With Brake Release keys¶
Warning
Be very cautious: if one of the Brake Release keys are inserted at the Hip and / or the Knee level, be aware that the brakes are not anymore protecting the robot.
Always keep a hand on the hip and another on the shoulder of the robot in order to prevent any risk of falling.
Wake up command has the regular effect.
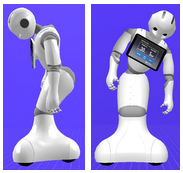
Rest command may have the regular effect if the robot is exactly in balance, but most of the time the robot will bow or even, in some cases, stoop: