Pepper - Actuator & Sensor list¶
| Battery - Brakes - Inertial - Joints and Actuators - Lasers - LEDs - Sonars - Switches - Touch sensor |
Joints and Actuators¶
|
HeadYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HeadYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HeadYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HeadYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HeadYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HeadYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HeadYaw/Temperature/Sensor/Status | Temperature status |
See also: Head joints.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/HeadYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/HeadYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/HeadYaw/Error [Level of failure severity: SERIOUS] |
Error |
HeadPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HeadPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HeadPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HeadPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HeadPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HeadPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HeadPitch/Temperature/Sensor/Status | Temperature status |
See also: Head joints.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/HeadPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/HeadPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/HeadPitch/Error [Level of failure severity: SERIOUS] |
Error |
LElbowYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LElbowYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LElbowYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LElbowYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LElbowYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LElbowYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LElbowYaw/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
LElbowRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LElbowRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LElbowRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LElbowRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LElbowRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LElbowRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LElbowRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
RElbowYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RElbowYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RElbowYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RElbowYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RElbowYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RElbowYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RElbowYaw/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RElbowYaw/Error [Level of failure severity: SERIOUS] |
Error |
RElbowRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RElbowRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RElbowRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RElbowRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RElbowRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RElbowRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RElbowRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RElbowRoll/Error [Level of failure severity: SERIOUS] |
Error |
LHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHand/Position/Actuator/Value | Position/Actuator (%) |
| Device/SubDeviceList/LHand/Position/Sensor/Value | Position/Sensor (%) |
| Device/SubDeviceList/LHand/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LHand/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LHand/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LHand/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LHand/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LHand/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LHand/Error [Level of failure severity: SERIOUS] |
Error |
LWristYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LWristYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LWristYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LWristYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LWristYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LWristYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LWristYaw/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
RHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHand/Position/Actuator/Value | Position/Actuator (%) |
| Device/SubDeviceList/RHand/Position/Sensor/Value | Position/Sensor (%) |
| Device/SubDeviceList/RHand/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RHand/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RHand/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RHand/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RHand/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RHand/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RHand/Error [Level of failure severity: SERIOUS] |
Error |
RWristYaw¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RWristYaw/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RWristYaw/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RWristYaw/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RWristYaw/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RWristYaw/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RWristYaw/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RWristYaw/Error [Level of failure severity: SERIOUS] |
Error |
LShoulderPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LShoulderPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LShoulderPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LShoulderPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LShoulderPitch/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
LShoulderRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LShoulderRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/LShoulderRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/LShoulderRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/LShoulderRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/LShoulderRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/LShoulderRoll/Temperature/Sensor/Status | Temperature status |
See also: Left Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/LShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/LShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
RShoulderPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RShoulderPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RShoulderPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RShoulderPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RShoulderPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RShoulderPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RShoulderPitch/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RShoulderPitch/Error [Level of failure severity: SERIOUS] |
Error |
RShoulderRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RShoulderRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/RShoulderRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/RShoulderRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/RShoulderRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/RShoulderRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/RShoulderRoll/Temperature/Sensor/Status | Temperature status |
See also: Right Arm joints and actuators.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/RShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/RShoulderRoll/Error [Level of failure severity: SERIOUS] |
Error |
HipRoll¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HipRoll/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HipRoll/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HipRoll/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HipRoll/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HipRoll/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HipRoll/Temperature/Sensor/Status | Temperature status |
See also: Leg joints.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/HipRoll/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/HipRoll/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/HipRoll/Error [Level of failure severity: CRITICAL] |
Error |
HipPitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/HipPitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/HipPitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/HipPitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/HipPitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/HipPitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/HipPitch/Temperature/Sensor/Status | Temperature status |
See also: Leg joints.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/HipPitch/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/HipPitch/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/HipPitch/Error [Level of failure severity: CRITICAL] |
Error |
KneePitch¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/KneePitch/Position/Actuator/Value | Position/Actuator (rad) |
| Device/SubDeviceList/KneePitch/Position/Sensor/Value | Position/Sensor (rad) |
| Device/SubDeviceList/KneePitch/ElectricCurrent/Sensor/Value | Current (A) |
| Device/SubDeviceList/KneePitch/Temperature/Sensor/Value | Temperature (°C) |
| Device/SubDeviceList/KneePitch/Hardness/Actuator/Value | Stiffness (%) |
| Device/SubDeviceList/KneePitch/Temperature/Sensor/Status | Temperature status |
See also: Leg joints.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/KneePitch/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/KneePitch/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/KneePitch/Error [Level of failure severity: CRITICAL] |
Error |
WheelFL¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/WheelFL/Position/Actuator/Value | ref:PA_radper_ju |
| Device/SubDeviceList/WheelFL/Position/Sensor/Value | ref:Po_radsec_ju |
| Device/SubDeviceList/WheelFL/ElectricCurrent/Sensor/Value | ref:current_ju |
| Device/SubDeviceList/WheelFL/Temperature/Sensor/Value | ref:temp_cel_ju |
| Device/SubDeviceList/WheelFL/Hardness/Actuator/Value | ref:stiffness_ju |
| Device/SubDeviceList/WheelFL/Temperature/Sensor/Status | ref:temp_sta_ju |
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/WheelFL/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/WheelFL/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/WheelFL/Error [Level of failure severity: CRITICAL] |
Error |
WheelFR¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/WheelFR/Position/Actuator/Value | ref:PA_radper_ju |
| Device/SubDeviceList/WheelFR/Position/Sensor/Value | ref:Po_radsec_ju |
| Device/SubDeviceList/WheelFR/ElectricCurrent/Sensor/Value | ref:current_ju |
| Device/SubDeviceList/WheelFR/Temperature/Sensor/Value | ref:temp_cel_ju |
| Device/SubDeviceList/WheelFR/Hardness/Actuator/Value | ref:stiffness_ju |
| Device/SubDeviceList/WheelFR/Temperature/Sensor/Status | ref:temp_sta_ju |
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/WheelFR/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/WheelFR/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/WheelFR/Error [Level of failure severity: CRITICAL] |
Error |
WheelB¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/WheelB/Position/Actuator/Value | ref:PA_radper_ju |
| Device/SubDeviceList/WheelB/Position/Sensor/Value | ref:Po_radsec_ju |
| Device/SubDeviceList/WheelB/ElectricCurrent/Sensor/Value | ref:current_ju |
| Device/SubDeviceList/WheelB/Temperature/Sensor/Value | ref:temp_cel_ju |
| Device/SubDeviceList/WheelB/Hardness/Actuator/Value | ref:stiffness_ju |
| Device/SubDeviceList/WheelB/Temperature/Sensor/Status | ref:temp_sta_ju |
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/WheelB/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/WheelB/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Temperature/WheelB/Error [Level of failure severity: CRITICAL] |
Error |
Position/Actuator
Joint angle (in radian) to reach.
Exception: for hands, aperture (in percentage); 0 means closed, 1 means opened.
Content update:
- if Stiffness > 0: the last position requested by a timed command.
- if Stiffness <= 0: the same value as the Position/Sensor.
Position/Actuator (rad)
Joint angle (in radian) to reach.
Content update:
- if Stiffness > 0: the last position requested by a timed command.
- if Stiffness <= 0: the same value as the Position/Sensor.
Position/Actuator (%)
Hand aperture (in percentage) to reach; 0 means closed, 1 means opened.
Content update:
- if Stiffness > 0: the last position requested by a timed command.
- if Stiffness <= 0: the same value as the Position/Sensor.
Position/Actuator (rad/s)
Rotation speed (rad/s) to reach by wheels.
Content update:
- if Stiffness > 0: the last position requested by a timed command.
- if Stiffness <= 0: the same value as the Position/Sensor.
Stiffness (%)
Stiffness
Stiffness of the joint (in percentage); 0.0 means 0% and 1.0 means 100% (full power).
In the motorboard, this percentage is directly applied to the max current. Setting the Stiffness to 0.5 means that the electric current limitation is reduced to 50%.
The Stiffness is sent to the motor board every DCM cycle time, so you can decrease/increase the control loop very fast. However, the current limitation may have some delay.
If the Stiffness is <0, the motor is free (no electromagnetic break), but due to hardware limitation, it’s only possible when the two motors of the same board are <0 (both are then free). If not, it’s still electromagnetic brake, but with a security that disable it when there is some movement, to protect the mechanics.
Stiffness may be automatically cut in case of problem (calibration, sensors …) seen at the DCM level or at the µc level, in order to protect the robot.
Position/Sensor (rad)
Angle of the joint (in radian).
Content update:
The sensor used is a Magnetic Rotary Encoder (MRE), used like potentiometer. It’s a 12bits precise value (from 0 to 4095) change in rad.
For further details, see: Pepper - MRE.
Position/Sensor (%)
Hand aperture (in percentage); 0 means closed, 1 means opened.
Content update:
The sensor used is a Magnetic Rotary Encoder (MRE), used like potentiometer. It’s a 12bits precise value (from 0 to 4095) change in percentage (0.0 to 1.0).
For further details, see: Pepper - MRE.
Position/Sensor (rad/s)
Rotation speed (rad/s) of the wheels.
Content update:
The sensor used is a Magnetic Rotary Encoder (MRE), used like potentiometer. It’s a 12bits precise value (from 0 to 4095) change in rad.
For further details, see: Pepper - MRE.
Current (A)
Every motorboard has a current sensor for each motor that is a shunt resistor. The current is an absolute value in Ampere.
Every joint has an electric current limitation: if the current reach the “Max” value (“ElectricCurrent/Sensor/Max”) the PWM (return by the control loop) will be decreased a bit until it returns under the maximum value, and it’s increased again after. This is a kind of current control loop around the maximum value. The aim of this limitation is to protect the motor, the electronic board, and the mechanical part of the joint.
Temperature (°C)
The motor temperature is a sensor placed on the motor housing. The motor board implements a temperature limitation to protect the motor. The temperature limitation depends on robot version.
Temperature status
The status is computed accordingly to the temperature limitation to protecting the motor. A non null value implies an automatic correction of the Stiffness.
- 0: means regular temperature
- 1: means temperature has reach the max limit, start reducing stiffness.
- 2: means the joint is very hot, stiffness reduced over 30%.
- 3: means the joint is critically hot, stiffness value is set to 0.
Error
The results of a diagnosis (see ALDiagnosis and Temperature Diagnosis). A int with 0 (success) or 1 (error).
Level of failure severity
This value defines the consequence of the device failure on the robot behavior. The higher the level is the less the robot will be functionnal.
The value could be: NEGLIGIBLE, SERIOUS or CRITICAL (see Diagnosis effect for more details about the robot behavior when a failure is detetected).
Touch sensor¶
Head¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Head/Touch/Front/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/Head/Touch/Rear/Sensor/Value | Touch (ON/OFF) |
| Device/SubDeviceList/Head/Touch/Middle/Sensor/Value | Touch (ON/OFF) |
See also: Head tactile sensor.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Head/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Head/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
LHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/LHand/Touch/Back/Sensor/Value | Touch (ON/OFF) |
See also: Tactile Hands.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/LHand/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/LHand/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
RHand¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/RHand/Touch/Back/Sensor/Value | Touch (ON/OFF) |
See also: Tactile Hands.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/RHand/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/RHand/Touch/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Touch (ON/OFF)
Touch sensors are capacitive sensors that return a 2 state float value 0.0 (unpressed) or 1.0 (pressed).
Depending on robot version, hands sensors are either inactive, or only one is active.
Switches¶
ChestBoard¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Button/Sensor/Value | Switch (ON/OFF) |
See also: Pepper - Buttons and Tactile Sensors.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Chest/Button/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Chest/Button/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Bumpers¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Platform/FrontRight/Bumper/Sensor/Value | Switch (ON/OFF) |
| Device/SubDeviceList/Platform/FrontLeft/Bumper/Sensor/Value | Switch (ON/OFF) |
| Device/SubDeviceList/Platform/Back/Bumper/Sensor/Value | Switch (ON/OFF) |
See also: Pepper - Bumpers.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Bumper/FrontRight/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Active/Bumper/FrontLeft/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Active/Bumper/Back/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Bumper/FrontRight/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Bumper/FrontLeft/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Bumper/Back/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Switch (ON/OFF)
Switches are simple sensors that return a 2-state float value 0.0 (unpressed) or 1.0 (pressed). Beware that the value is read only every 10ms, and very fast change may be unseen.
Inertial¶
Gyroscope¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/GyroscopeX/Sensor/Value | Gyroscope (rad/s) |
| Device/SubDeviceList/InertialSensor/GyroscopeY/Sensor/Value | Gyroscope (rad/s) |
| Device/SubDeviceList/InertialSensor/GyroscopeZ/Sensor/Value | Gyroscope (rad/s) |
See also: Inertial unit specifications.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Gyrometer/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/Gyrometer/Error [Level of failure severity: CRITICAL] |
Error |
Angle¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/AngleX/Sensor/Value | Angles (rad) |
| Device/SubDeviceList/InertialSensor/AngleY/Sensor/Value | Angles (rad) |
| Device/SubDeviceList/InertialSensor/AngleZ/Sensor/Value | Angles (rad) |
See also: Inertial unit specifications.
Accelerometer¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/InertialSensor/AccelerometerX/Sensor/Value | Accelerometer (m/s²) |
| Device/SubDeviceList/InertialSensor/AccelerometerY/Sensor/Value | Accelerometer (m/s²) |
| Device/SubDeviceList/InertialSensor/AccelerometerZ/Sensor/Value | Accelerometer (m/s²) |
See also: Inertial unit specifications.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Accelerometer/Error [Level of failure severity: CRITICAL] |
Error |
Diagnosis/Passive/Accelerometer/Error [Level of failure severity: CRITICAL] |
Error |
Gyroscope (rad/s)
Theses are direct rotation speed values in rad.s-1 from the inertial sensor in the center of the body.
Angles (rad)
The inertial board computes 3 inclination angles of the robot body with the gyro and accelero data. All angles are in radians.
Accelerometer (m/s²)
Theses are 3-axis acceleration in m.s-2 from the inertial sensor in the center of the body (one g is approximately 9.81 m.s-2) Depending the robot version, the precision is 8 or 12 bits.
There are other deprecated values still returned.
LEDs¶
| Eyes - Ears- ChestBoard - |
Eyes¶
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Face/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Face/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Face/Led/Red/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Red/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Face/Led/Green/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Green/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Face/Led/Blue/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Blue/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Left/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Face/Led/Red/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Red/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Red/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Face/Led/Green/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Green/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Green/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Face/Led/Blue/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Face/Led/Blue/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/45Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/90Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/135Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/225Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/270Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Face/Led/Blue/Right/315Deg/Actuator/Value | LED (%) |
See also: Eye LED specifications.
Ears¶
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Ears/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Ears/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Ears/Led/Right¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Ears/Led/Right/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/36Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/72Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/108Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/144Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/216Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/252Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/288Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Right/324Deg/Actuator/Value | LED (%) |
See also: Ear LED specifications.
Ears/Led/Left¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Ears/Led/Left/0Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/36Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/72Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/108Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/144Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/180Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/216Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/252Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/288Deg/Actuator/Value | LED (%) |
| Device/SubDeviceList/Ears/Led/Left/324Deg/Actuator/Value | LED (%) |
See also: Ear LED specifications.
ChestBoard¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Led/Red/Actuator/Value | LED (%) |
| Device/SubDeviceList/ChestBoard/Led/Green/Actuator/Value | LED (%) |
| Device/SubDeviceList/ChestBoard/Led/Blue/Actuator/Value | LED (%) |
See also: Shoulder LED specifications.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/ChestBoard/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/ChestBoard/Led/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Led state¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/ChestBoard/Led/State/Actuator/Value | LED state (number) |
LED (%)
Every LED is a simple actuator that has a float value from 0.0 (no light) to 1.0 (full light). Each LED has only one color, but there could be 3 LEDs (RGB) at the same place to have a full color RGB LED. But for the DCM point of view it’s always 3 LEDs. The number of real differents values of leds depends on the leds (64 for the eyes, 256 for chest & foot)
Warning
Unfortunately, having 3 RGB LEDs set to “1.0” does not mean that you’ll see a perfect white: one or two LEDs will be brighter than others.
Warning
Chest LEDs are now located in the shoulder.
LED state (number)
Internal. Do not use.
Sonars¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Platform/Front/Sonar/Sensor/Value | Sonar/Sensor (m) |
| Device/SubDeviceList/Platform/Back/Sonar/Sensor/Value | Sonar/Sensor (m) |
See also: Sonar specifications.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Sonar/Front/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Active/Sonar/Back/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Sonar/Front/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Diagnosis/Passive/Sonar/Back/Error [Level of failure severity: NEGLIGIBLE] |
Error |
Sonar/Sensor (m)
Continuous distance update from sonars, in meters.
Battery¶
| Key | See ... |
|---|---|
| Device/SubDeviceList/Battery/Current/Sensor/Value | current Sensor (A) |
| Device/SubDeviceList/Battery/Charge/Sensor/Value | Charge Sensor (%) |
| Device/SubDeviceList/Battery/Temperature/Sensor/Value | Temperature Sensor (%) |
| Device/SubDeviceList/Battery/TemperatureSensorInternal/Sensor/Value | Temperature Sensor (%) |
| Device/SubDeviceList/Battery/TemperatureSensor1/Sensor/Value | Temperature Sensor (%) |
| Device/SubDeviceList/Battery/TemperatureSensor2/Sensor/Value | Temperature Sensor (%) |
| Device/SubDeviceList/Battery/TemperatureSensor3/Sensor/Value | Temperature Sensor (%) |
| Device/SubDeviceList/Battery/Voltage1/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage2/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage3/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage4/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage5/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage6/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage7/Sensor/Value | Voltage Sensor (%) |
| Device/SubDeviceList/Battery/Voltage8/Sensor/Value | Voltage Sensor (%) |
See also: Batttery specifications.
| Diagnosis Keys | See ... |
|---|---|
Diagnosis/Active/Battery/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Passive/Battery/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/Battery/Error [Level of failure severity: SERIOUS] |
Error |
Diagnosis/Temperature/BatteryFuse/Error [Level of failure severity: CRITICAL] |
Error |
Power hatch¶
| Key | |
|---|---|
| Device/SubDeviceList/Platform/ILS/Sensor/Value | 0 means closed, 1 means open |
See also: Pepper - Power entries.
Brakes¶
| Diagnosis Keys | See ... |
|---|---|
| Diagnosis/Active/Brake/HipPitch/Error [Level of failure severity: CRITICAL] | Error |
| Diagnosis/Active/Brake/KneePitch/Error [Level of failure severity: CRITICAL] | Error |
Lasers¶
| Front ground evaluation: Shovel data (A) | Vertical right data (B) | Vertical left data (C) | Surrounding: Front (D) | Left (E) | Right (F) |
| Diagnosis Key | See ... |
|---|---|
| Diagnosis/Passive/LaserSensor/Front/Error | Error |
| Diagnosis/Passive/LaserSensor/Right/Error | Error |
| Diagnosis/Passive/LaserSensor/Left/Error | Error |
Front ground evaluation¶
Shovel data (A)¶
| Key | See ... |
|---|---|
| Platform/LaserSensor/Front/Shovel/Seg01/X/Sensor/Value | Distances |
| Platform/LaserSensor/Front/Shovel/Seg01/Y/Sensor/Value | Distances |
| Platform/LaserSensor/Front/Shovel/Seg02/X/Sensor/Value | Distances |
| Platform/LaserSensor/Front/Shovel/Seg02/Y/Sensor/Value | Distances |
| Platform/LaserSensor/Front/Shovel/Seg03/X/Sensor/Value | Distances |
| Platform/LaserSensor/Front/Shovel/Seg03/Y/Sensor/Value | Distances |
Surrounding¶
Front (D)¶
| Key | See ... |
|---|---|
| Platform/LaserSensor/Front/Reg/Status/Sensor | |
| Platform/LaserSensor/Front/Reg/BoardTemp/Sensor | |
| Platform/LaserSensor/Front/Reg/FrameCount/Sensor | Frames captured |
| Platform/LaserSensor/Front/Reg/AssertFailCount/Sensor | |
| Platform/LaserSensor/Front/Reg/RunMode/Sensor | |
| Platform/LaserSensor/Front/Reg/CalibrDataVer/Sensor | |
| Platform/LaserSensor/Front/Reg/OperationMode/Actuator | Operation mode actuator |
| Platform/LaserSensor/Front/Reg/OperationMode/Sensor | Operation mode sensor |
See also: Laser specifications.
Horizontal obstacle data
| Key | See ... |
|---|---|
| Platform/LaserSensor/Front/Horizontal/Seg01/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg01/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg02/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg02/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg03/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg03/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg04/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg04/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg05/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg05/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg06/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg06/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg07/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg07/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg08/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg08/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg09/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg09/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg10/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg10/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg11/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg11/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg12/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg12/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg13/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg13/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg14/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg14/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg15/X/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Seg15/Y/Sensor | Distances |
| Platform/LaserSensor/Front/Horizontal/Reg/DataStatus/Sensor | |
| Platform/LaserSensor/Front/Horizontal/Reg/Time/Sensor |
Left (E)¶
| Key | See ... |
|---|---|
| Platform/LaserSensor/Left/Reg/Status/Sensor | |
| Platform/LaserSensor/Left/Reg/BoardTemp/Sensor | |
| Platform/LaserSensor/Left/Reg/FrameCount/Sensor | Frames captured |
| Platform/LaserSensor/Left/Reg/AssertFailCount/Sensor | |
| Platform/LaserSensor/Left/Reg/RunMode/Sensor | |
| Platform/LaserSensor/Left/Reg/CalibrDataVer/Sensor | |
| Platform/LaserSensor/Left/Reg/OperationMode/Actuator | Operation mode actuator |
| Platform/LaserSensor/Left/Reg/OperationMode/Sensor | Operation mode sensor |
See also: Laser specifications.
Horizontal obstacle data
| Key | See ... |
|---|---|
| Platform/LaserSensor/Left/Horizontal/Seg01/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg01/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg02/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg02/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg03/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg03/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg04/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg04/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg05/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg05/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg06/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg06/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg07/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg07/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg08/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg08/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg09/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg09/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg10/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg10/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg11/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg11/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg12/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg12/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg13/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg13/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg14/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg14/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg15/X/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Seg15/Y/Sensor | Distances |
| Platform/LaserSensor/Left/Horizontal/Reg/DataStatus/Sensor | |
| Platform/LaserSensor/Left/Horizontal/Reg/Time/Sensor |
Right (F)¶
| Key | See ... |
|---|---|
| Platform/LaserSensor/Right/Reg/Status/Sensor | |
| Platform/LaserSensor/Right/Reg/BoardTemp/Sensor | |
| Platform/LaserSensor/Right/Reg/FrameCount/Sensor | Frames captured |
| Platform/LaserSensor/Right/Reg/AssertFailCount/Sensor | |
| Platform/LaserSensor/Right/Reg/RunMode/Sensor | |
| Platform/LaserSensor/Right/Reg/CalibrDataVer/Sensor | |
| Platform/LaserSensor/Right/Reg/OperationMode/Actuator | Operation mode actuator |
| Platform/LaserSensor/Right/Reg/OperationMode/Sensor | Operation mode sensor |
See also: Laser specifications.
Horizontal obstacle data
| Key | See ... |
|---|---|
| Platform/LaserSensor/Right/Horizontal/Seg01/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg01/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg02/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg02/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg03/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg03/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg04/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg04/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg05/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg05/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg06/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg06/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg07/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg07/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg08/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg08/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg09/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg09/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg10/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg10/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg11/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg11/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg12/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg12/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg13/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg13/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg14/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg14/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg15/X/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Seg15/Y/Sensor | Distances |
| Platform/LaserSensor/Right/Horizontal/Reg/DataStatus/Sensor | |
| Platform/LaserSensor/Right/Horizontal/Reg/Time/Sensor |
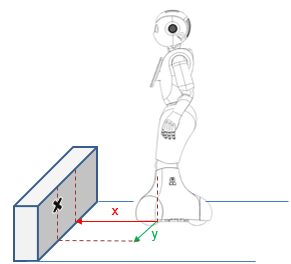
Distances
The distances returned follow the robot’s coordinate system, with the position of the camera, projected on the ground, as the origin.
Frames captured
Frames captured since the start of the robot. Rolls over after 65535.
Operation mode Actuator
Sets the operation mode.
The operation mode determines which lasers are activated. All cards contain the operation mode 0 and 1. The operation modes 2-7 are only available in the front sensor, they cannot be activated on the left+right sensors simply because they only have a horizontal laser.
0: all lasers off 1: horizontal laser on 2: 2x vertical lasers on 3: horizontal + 2x vertical lasers on 4: shovel laser on 5: shovel + horizontal laser on 6: shovel + 2x vertical lasers on 7: shovel + horizontal + 2x vertical lasers on |
Operation mode Sensor
Reads the operation mode.