Pepper - Bumpers¶
See also
Specification¶
The robot is equipped with 3 bumpers.
Location¶
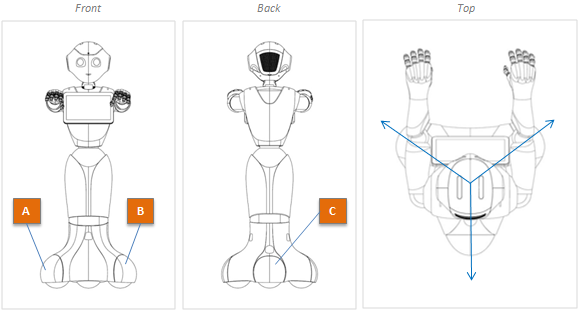
Position relative to KneePitch.
| Part | Location | Name | X(m) | Y(m) | Z(m) | WX(deg) | WY(deg) | WZ(deg) |
|---|---|---|---|---|---|---|---|---|
| A | Front Right | BumperFR | 0.12900 | -0.22700 | -0.26400 | -0.00000 | -0.00000 | -28.00000 |
| B | Front Left | BumperFL | 0.12900 | 0.22700 | -0.26400 | 0.00000 | -0.00000 | 28.00000 |
| C | Back | BumperB | -0.25100 | 0.00000 | -0.26400 | 0.00000 | -0.00000 | -180.00000 |
To access values by using ALMemory key names, see: Bumpers.