Pepper - Masses
Warning
The Masses as well as the Center of Mass positions taken in account
in the robot models have been updated in order to remove the slight
dissymmetry between left and right limbs.
Legend
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.
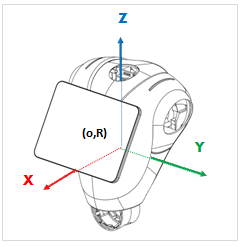
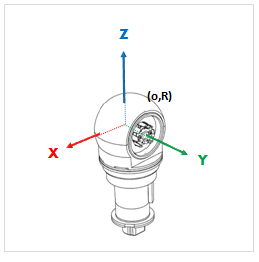
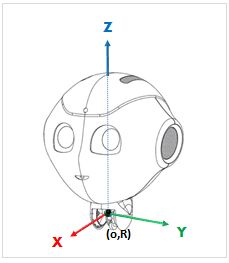
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
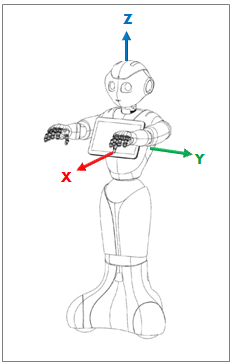
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight leg and arms pointing forwards.
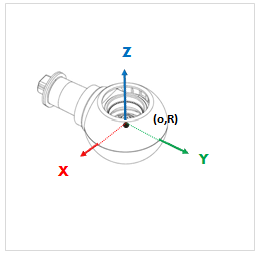
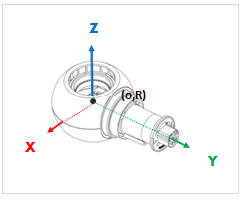
Torso
(o, R) is located on: Torso.
Neck
(o, R) is located on: HeadYaw.
Head
(o, R) is located on: HeadPitch.
Left Shoulder
(o, R) is located on: LShoulderPitch.
Left Bicep
(o, R) is located on: LShoulderRoll.
Left Elbow
(o, R) is located on: LElbowYaw.
Left ForeArm
(o, R) is located on: LElbowRoll.
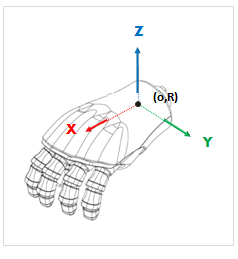
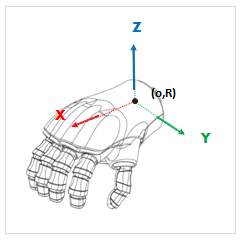
Left Hand with fingers
(o, R) is located on: LWristYaw.
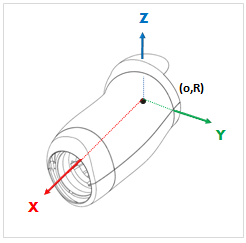
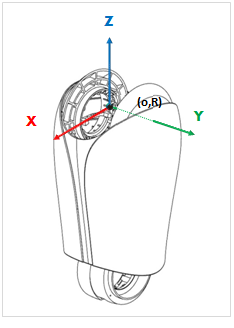
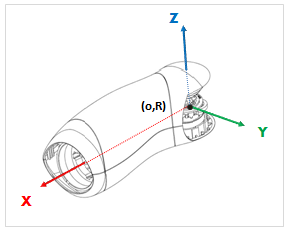
Hip
(o, R) is located on: HipRoll.
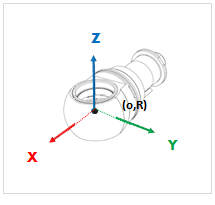
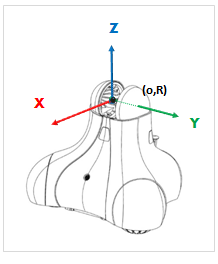
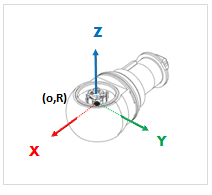
Thighs
(o, R) is located on: HipPitch.
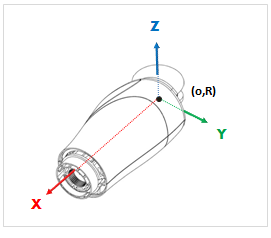
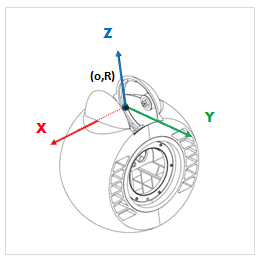
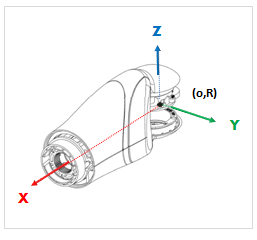
Base with Wheels
(o, R) is located on: KneePitch.
Right Shoulder
(o, R) is located on: RShoulderPitch.
Right Bicep
(o, R) is located on: RShoulderRoll.
Right Elbow
(o, R) is located on: RElbowYaw.
Right ForeArm
(o, R) is located on: RElbowRoll.
Right Hand with fingers
(o, R) is located on: RWristYaw.
Appendix
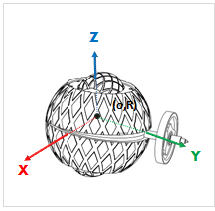
Wheel - Front Left
(o, R) is located on: WheelFL.
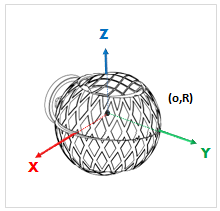
Wheel - Front Right
(o, R) is located on: WheelFR.
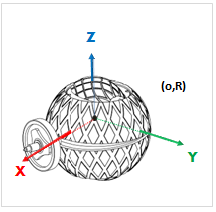
Wheel - Back
(o, R) is located on: WheelB.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00322\\
0\\
-0.01029
\end{array}
\right]_{(o, R)}](../../_images/math/2453f80ebcf5451f6c77f7d848431305cec275ba.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.045699130744 & 0 & -0.0051232860424\\
0 & 0.04373466596 & 0.00026688593789\\
-0.0051232860424 & 0.00026688593789 & 0.02592952922\\
\end{array}
\right]_R](../../_images/math/07f4daede506981c0b554eed899d7b1617a7e9e5.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00207\\
0\\
-0.02636
\end{array}
\right]_{(o, R)}](../../_images/math/d8bbfc293123f509d93a465c3083e7de5e28c97b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00053382734768 & 0 & 3.3802258258e-05\\
0 & 0.00068539753556 & -2.0986299205e-06\\
3.3802258258e-05 & -2.0986299205e-06 & 0.00021642596403\\
\end{array}
\right]_R](../../_images/math/a9b4f07fd0260238b0501b7c255777eaa653db70.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00312\\
0\\
0.11152
\end{array}
\right]_{(o, R)}](../../_images/math/ed062fee8dfca9e5a254e068a999d7549c4b8297.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.024862580001 & 0 & 0.0004033621517\\
0 & 0.024810679257 & -4.3427999685e-07\\
0.0004033621517 & -4.3427999685e-07 & 0.0057185231708\\
\end{array}
\right]_R](../../_images/math/52f618431c5d3c5ad1d6902709198e629bd5b1ea.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00018\\
-0.01856\\
0.00099
\end{array}
\right]_{(o, R)}](../../_images/math/98c832e546f9b604287ff37e2ecf3c528233c996.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00046915243729 & 9.3946999868e-07 & -5.8021998939e-07\\
9.3946999868e-07 & 0.000137545896 & -5.3219999074e-08\\
-5.8021998939e-07 & -5.3219999074e-08 & 0.0005068522878\\
\end{array}
\right]_R](../../_images/math/5851d2b4ce3468979322ebb2cdf4ddc18ac92b9d.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.08151\\
0.01284\\
-0.01017
\end{array}
\right]_{(o, R)}](../../_images/math/964b248b308d12e27b37eae93fef66071ce69832.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00063643301837 & 0.00056440150365 & -0.00050397327868\\
0.00056440150365 & 0.0046720537357 & -7.5047697464e-05\\
-0.00050397327868 & -7.5047697464e-05 & 0.0045974343084\\
\end{array}
\right]_R](../../_images/math/87e945d471dd2e1c081dcd2e7a3c7be0bfccd0df.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02297\\
-0.00019\\
0.00119
\end{array}
\right]_{(o, R)}](../../_images/math/102b7ae8294436fcbaaf166e62cb4850a2577a20.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00012337038061 & 2.1393999816e-07 & 1.8068200006e-05\\
2.1393999816e-07 & 0.00047722423915 & 1.927079893e-06\\
1.8068200006e-05 & 1.927079893e-06 & 0.00044812628767\\
\end{array}
\right]_R](../../_images/math/02b8cb3788dba5b49c953eb1f71c3c0cc296fbe2.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.0593\\
0.00271\\
-0.01014
\end{array}
\right]_{(o, R)}](../../_images/math/e00c9f9f2f7c36bc553dcd1ddc637c1590a99934.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0015833961079 & 1.1891290342e-05 & -3.911523163e-05\\
1.1891290342e-05 & 0.0023322382476 & -4.3796198952e-06\\
-3.911523163e-05 & -4.3796198952e-06 & 0.00085729791317\\
\end{array}
\right]_R](../../_images/math/3277a89081bff806ced7cbef98437d72d3b1e7f6.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.03536\\
-0.00072\\
-0.00207
\end{array}
\right]_{(o, R)}](../../_images/math/af1c874446b4e8561a9bff8e8e6b1dedbce961b9.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00015296612401 & -1.7678210497e-05 & -2.3064030756e-05\\
-1.7678210497e-05 & 0.00077680806862 & 3.5478299196e-06\\
-2.3064030756e-05 & 3.5478299196e-06 & 0.0008008434088\\
\end{array}
\right]_R](../../_images/math/1e36b7a6b8b18df964508f7db375fbce01245bcc.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00032\\
0\\
-0.06039
\end{array}
\right]_{(o, R)}](../../_images/math/14b73b71d0e29c65cc8c27a7b2a23aee241a6abc.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0087564364076 & 0 & 5.7145098253e-06\\
0 & 0.010142030194 & -0.000159449075\\
5.7145098253e-06 & -0.000159449075 & 0.0044109211303\\
\end{array}
\right]_R](../../_images/math/f78f129cd7dcf0f08791097b81f03657ebaa6bb1.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00237\\
0\\
-0.09654
\end{array}
\right]_{(o, R)}](../../_images/math/49ff02223d2a5480ac2abc9c7da3bb16f74d7575.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.057270400226 & 0 & -0.00078569183825\\
0 & 0.053245455027 & 8.3754159277e-05\\
-0.00078569183825 & 8.3754159277e-05 & 0.014390878379\\
\end{array}
\right]_R](../../_images/math/65ff417ece8fa1cc8be114951c0e9a52e9d35869.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00249\\
0\\
-0.20536
\end{array}
\right]_{(o, R)}](../../_images/math/4dd32c4a62bebb8a0d55bb6b8d6ac1d6b3981b5b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.86977553368 & 0.00040178798372 & -0.0086652245373\\
0.00040178798372 & 0.85964071751 & 0\\
-0.0086652245373 & 0 & 0.23531636596\\
\end{array}
\right]_R](../../_images/math/bc566ab03b7584fe0f2825a7bb4490cf49278731.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.00018\\
0.01856\\
0.00099
\end{array}
\right]_{(o, R)}](../../_images/math/cd568af874cfe1e5af51ed1931ae6b3bba7cd002.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00046915243729 & -9.3946999868e-07 & -5.8021998939e-07\\
-9.3946999868e-07 & 0.000137545896 & 5.3219999074e-08\\
-5.8021998939e-07 & 5.3219999074e-08 & 0.0005068522878\\
\end{array}
\right]_R](../../_images/math/9de2cdcca0dc57d9df7b8f03ab2a12fca5991684.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.08151\\
-0.01284\\
-0.01017
\end{array}
\right]_{(o, R)}](../../_images/math/e1186ae16f5f630bec4cf0c30a91bd6f3e8a1a4e.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00063643301837 & -0.00056440150365 & -0.00050397327868\\
-0.00056440150365 & 0.0046720537357 & 7.5047697464e-05\\
-0.00050397327868 & 7.5047697464e-05 & 0.0045974343084\\
\end{array}
\right]_R](../../_images/math/c2158ad007a62d5e8072d34560db571f99aa55ee.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02297\\
0.00019\\
0.00119
\end{array}
\right]_{(o, R)}](../../_images/math/f3917e862938bfa7e3639b73ff1fd82edca10f9f.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00012337038061 & -2.1393999816e-07 & 1.8068200006e-05\\
-2.1393999816e-07 & 0.00047722423915 & -1.927079893e-06\\
1.8068200006e-05 & -1.927079893e-06 & 0.00044812628767\\
\end{array}
\right]_R](../../_images/math/1f6699a838497a74860dd5ed87ebecb020d46c88.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.0593\\
-0.00271\\
-0.01014
\end{array}
\right]_{(o, R)}](../../_images/math/29e1eac88c7418ed72f8f47e172240349318aeb5.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0015833961079 & -1.1891290342e-05 & -3.911523163e-05\\
-1.1891290342e-05 & 0.0023322382476 & 4.3796198952e-06\\
-3.911523163e-05 & 4.3796198952e-06 & 0.00085729791317\\
\end{array}
\right]_R](../../_images/math/cbd9721c222488418756a8d6ad1025e80f90cff7.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.03536\\
0.00072\\
-0.00207
\end{array}
\right]_{(o, R)}](../../_images/math/a87c40cd7a783373c6c88178b749ff907a3ca9ca.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00015296612401 & 1.7678210497e-05 & -2.3064030756e-05\\
1.7678210497e-05 & 0.00077680806862 & -3.5478299196e-06\\
-2.3064030756e-05 & -3.5478299196e-06 & 0.0008008434088\\
\end{array}
\right]_R](../../_images/math/78abd43f926c3f81d7b1167cb6a8d6a67a22e01b.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00058\\
-0.00063\\
0.0001
\end{array}
\right]_{(o, R)}](../../_images/math/9de20b0b824f8a5b3bc31370869c596dfb083834.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0025765921455 & -1.6344199594e-06 & -4.1009738197e-05\\
-1.6344199594e-06 & 0.0026606358588 & -1.8152999814e-07\\
-4.1009738197e-05 & -1.8152999814e-07 & 0.0024298275821\\
\end{array}
\right]_R](../../_images/math/d7992be44c61d6dc1ec7aefd783f0b6d209b9e33.png)