ALTouch¶
NAOqi Sensors & LEDs - Overview | API


What it does¶
The ALTouch module generates the event TouchChanged() whenever
the robot is touched.
The event TouchChanged() gives you a list of AL::ALValue with a body part
and a boolean for the touch status.
For example:
- [[“Head/Touch/Middle”,
True], [“ChestBoard/Button”,True]] - [[“Head/Touch/Middle”,
False]] - [[“LArm”,
True], [“RHand”,False]]
How it works¶
The aim of these sensors is to determine whether the robot is touched.
It’s a bistable behavior, an event is raised when for example the head is touched with the value
True then an other one when the head is not touch anymore with the value False.
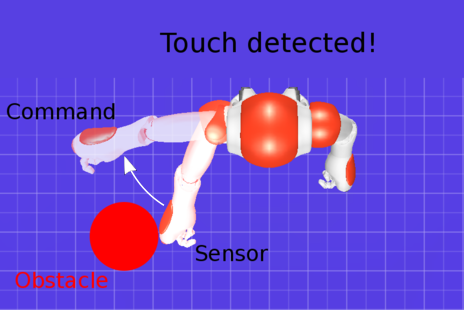
For the button [tactile, bumper, chest ...], the value is read in the ALMemory and if the status changed, an event is raised. For body parts that do not have capacitive sensors, touch is detected by a difference between joint angle commands and sensor.
Making a Python module - Reacting to Touch¶
The example below is a NAOqi Python module that reacts to touch events.
# -*- encoding: UTF-8 -*-
"""Example: Say `My {Body_part} is touched` when receiving a touch event"""
import qi
import argparse
import functools
import sys
class ReactToTouch(object):
""" A simple module able to react
to touch events.
"""
def __init__(self, app):
super(ReactToTouch, self).__init__()
# Get the services ALMemory, ALTextToSpeech.
app.start()
session = app.session
self.memory_service = session.service("ALMemory")
self.tts = session.service("ALTextToSpeech")
# Connect to an Naoqi1 Event.
self.touch = self.memory_service.subscriber("TouchChanged")
self.id = self.touch.signal.connect(functools.partial(self.onTouched, "TouchChanged"))
def onTouched(self, strVarName, value):
""" This will be called each time a touch
is detected.
"""
# Disconnect to the event when talking,
# to avoid repetitions
self.touch.signal.disconnect(self.id)
touched_bodies = []
for p in value:
if p[1]:
touched_bodies.append(p[0])
self.say(touched_bodies)
# Reconnect again to the event
self.id = self.touch.signal.connect(functools.partial(self.onTouched, "TouchChanged"))
def say(self, bodies):
if (bodies == []):
return
sentence = "My " + bodies[0]
for b in bodies[1:]:
sentence = sentence + " and my " + b
if (len(bodies) > 1):
sentence = sentence + " are"
else:
sentence = sentence + " is"
sentence = sentence + " touched."
self.tts.say(sentence)
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--ip", type=str, default="127.0.0.1",
help="Robot IP address. On robot or Local Naoqi: use '127.0.0.1'.")
parser.add_argument("--port", type=int, default=9559,
help="Naoqi port number")
args = parser.parse_args()
try:
# Initialize qi framework.
connection_url = "tcp://" + args.ip + ":" + str(args.port)
app = qi.Application(["ReactToTouch", "--qi-url=" + connection_url])
except RuntimeError:
print ("Can't connect to Naoqi at ip \"" + args.ip + "\" on port " + str(args.port) +".\n"
"Please check your script arguments. Run with -h option for help.")
sys.exit(1)
react_to_touch = ReactToTouch(app)
app.run()
