Cartesian control Tutorial: The Hula-Hoop motion¶
NAOqi Motion - Overview | API | Tutorial
Introduction¶
This tutorial explains how to use Cartesian control API to make the robot perform a Hula-Hoop motion (Torso control in position and in rotation).
Note
The tutorial is written in Python.
Download¶
You can download the Hula Hoop example here:
almotion_hulaHoop.py
Please refer to the section: Python SDK - Installation Guide for any troubleshooting linked to python.
Code review¶
In this section we describe each important piece of code of the example.
NAOqi tools¶
- First, we import some external libraries:
- argparse: toolbox useful to define parameter
- motion: some useful definitions such as FRAME.
- almath: an optimized mathematic toolbox for robotics. For further details, see: libalmath API reference.
- ALProxy: create proxy to motion and robotposture modules
Then, the proxy to ALMotion module is created. This proxy is useful to call ALMotion API.
"""Example: Use transformInterpolations Method to play short animation"""
import qi
import argparse
import sys
import almath
import motion
def main(session):
"""
Use transformInterpolations Method to play short animation.
This example will only work on Nao.
"""
# Get the services ALMotion & ALRobotPosture.
motion_service = session.service("ALMotion")
posture_service = session.service("ALRobotPosture")
Initialization of the robot¶
When doing Cartesian control, it is important to be sure that the robot is in a good configuration. To
have the maximum range of control, the maximum stability and far away of singularity.
A PoseInit is a good posture before a Cartesian control
of the robot Torso.
# Wake up robot
motion_service.wakeUp()
# Send robot to Stand Init
posture_service.goToPosture("StandInit", 0.5)
Control point¶
Here, we specify that we want to control the Torso (see Effectors)
in the FRAME_ROBOT (see Frames) and that we want to control all the motion
with a AXIS_MASK_ALL (see Axis Masks).
We also specify that the torso path is defined in absolute.
effector = "Torso"
frame = motion.FRAME_ROBOT
axisMask = almath.AXIS_MASK_ALL
useSensorValues = False
currentTf = almath.Transform(motion_service.getTransform(effector, frame, useSensorValues))
Hula hoop motion¶
- We define the hula hoop motion with four checkPoints:
- forward / bend backward
- right / bend left
- backward / bend forward
- left / bend right
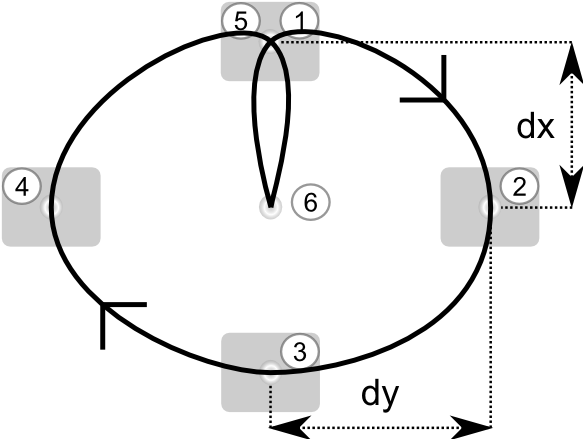
We define two loops of hula hoop. You can accelerate the motion by playing with the timeOneMove variable.
# Define the changes relative to the current position
dx = 0.03 # translation axis X (meter)
dy = 0.03 # translation axis Y (meter)
dwx = 8.0*almath.TO_RAD # rotation axis X (rad)
dwy = 8.0*almath.TO_RAD # rotation axis Y (rad)
# point 01 : forward / bend backward
target1Tf = almath.Transform(currentTf.r1_c4, currentTf.r2_c4, currentTf.r3_c4)
target1Tf *= almath.Transform(dx, 0.0, 0.0)
target1Tf *= almath.Transform().fromRotY(-dwy)
# point 02 : right / bend left
target2Tf = almath.Transform(currentTf.r1_c4, currentTf.r2_c4, currentTf.r3_c4)
target2Tf *= almath.Transform(0.0, -dy, 0.0)
target2Tf *= almath.Transform().fromRotX(-dwx)
# point 03 : backward / bend forward
target3Tf = almath.Transform(currentTf.r1_c4, currentTf.r2_c4, currentTf.r3_c4)
target3Tf *= almath.Transform(-dx, 0.0, 0.0)
target3Tf *= almath.Transform().fromRotY(dwy)
# point 04 : left / bend right
target4Tf = almath.Transform(currentTf.r1_c4, currentTf.r2_c4, currentTf.r3_c4)
target4Tf *= almath.Transform(0.0, dy, 0.0)
target4Tf *= almath.Transform().fromRotX(dwx)
path = []
path.append(list(target1Tf.toVector()))
path.append(list(target2Tf.toVector()))
path.append(list(target3Tf.toVector()))
path.append(list(target4Tf.toVector()))
path.append(list(target1Tf.toVector()))
path.append(list(target2Tf.toVector()))
path.append(list(target3Tf.toVector()))
path.append(list(target4Tf.toVector()))
path.append(list(target1Tf.toVector()))
path.append(list(currentTf.toVector()))
timeOneMove = 0.5 #seconds
times = []
for i in range(len(path)):
times.append((i+1)*timeOneMove)
Call the Cartesian control API¶
# call the cartesian control API
motion_service.transformInterpolations(effector, frame, path, axisMask, times)
# Go to rest position
motion_service.rest()
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--ip", type=str, default="127.0.0.1",
help="Robot IP address. On robot or Local Naoqi: use '127.0.0.1'.")
parser.add_argument("--port", type=int, default=9559,
help="Naoqi port number")
args = parser.parse_args()
session = qi.Session()
try:
session.connect("tcp://" + args.ip + ":" + str(args.port))
except RuntimeError:
print ("Can't connect to Naoqi at ip \"" + args.ip + "\" on port " + str(args.port) +".\n"
"Please check your script arguments. Run with -h option for help.")
sys.exit(1)
main(session)
