Idle¶
NAOqi Motion - Overview | API
What it does¶
How it works¶
Idle control modes¶
There are three idle control modes:
- No idle control: in this mode, when no user command is sent to the robot, it does not move.
- Idle posture control: in this mode, the robot automatically comes back to a reference posture, then stays at that posture until a user command is sent.
- Breathing control: in this mode, the robot plays a breathing animation in loop.
Body chain idle control¶
The idle behavior of the robot is defined body chain per body chain.
The idle control of any body chain can be activated or deactivated at any moment, with
ALMotionProxy::setIdlePostureEnabled and
ALMotionProxy::setBreathEnabled. The last call to either of these functions
defines a body chain idle control mode.
Any other user command overrides an idle task.
Transitions to and from idle task are automatic and smooth.
Breath configuration¶
Breathing animation can be activated on the following chains: “Body”, “Legs”, “Arms”, “LArm”, “RArm” and “Head”. The animation only works when the robot is standing.
The breath task can be configured by setting two parameters:
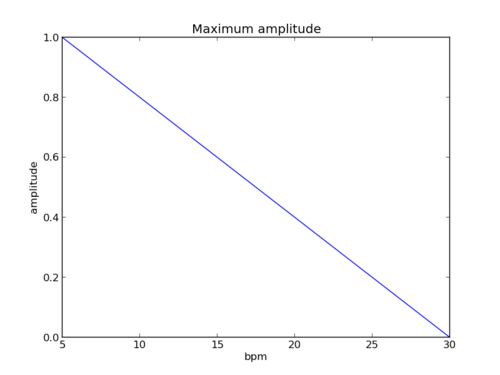
- ‘Bpm’: The breathing frequency, in beats per minute, between 5 and 30.
- ‘Amplitude’: The animation amplitude, unit free value between 0 and 1. 0 corresponds to a minimal animation, where all joints move of at most 5 degrees.
The default breathing configuration is: [['Bpm', 12], ['Amplitude', 0.5]]
Warning
To avoid unstable animations, not all combinations of ‘Bpm’ and ‘Amplitude’ are allowed on the robot. At minimum frequency, all amplitudes are allowed, and at maximum frequency, only minimum amplitude is possible. In-between, a linear interpolation is used to compute the maximum amplitude. If needed, user input amplitude is clipped to satisfy the constraints.
Getting started¶
This example shows how to start an idle task on a robot, in breathing mode, and how to change the parameters of the breathing dynamically.
#! /usr/bin/env python
# -*- encoding: UTF-8 -*-
"""Example: Use case of breath API"""
import qi
import argparse
import sys
import time
def main(session):
"""
Use case of breath API
"""
# Get the services ALMotion & ALRobotPosture.
motion_service = session.service("ALMotion")
posture_service = session.service("ALRobotPosture")
# Wake up robot
motion_service.wakeUp()
# Send robot to Stand Init
posture_service.goToPosture("StandInit", 0.5)
# Start breathing
motion_service.setBreathEnabled('Body', True)
# Get default breath config
print 'Current breath config: ' + str(motion_service.getBreathConfig())
# Wait for 10 seconds, and let the robot play the breathing animation
time.sleep(10)
# Change breathing configuration to a faster one
print 'Breath faster'
motion_service.setBreathConfig([['Bpm', 30], ['Amplitude', 0.0]])
# Let the robot play the new animation
time.sleep(10)
# Stop breathing
motion_service.setBreathEnabled('Body', False)
# Go to rest position
print 'rest'
motion_service.rest()
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--ip", type=str, default="127.0.0.1",
help="Robot IP address. On robot or Local Naoqi: use '127.0.0.1'.")
parser.add_argument("--port", type=int, default=9559,
help="Naoqi port number")
args = parser.parse_args()
session = qi.Session()
try:
session.connect("tcp://" + args.ip + ":" + str(args.port))
except RuntimeError:
print ("Can't connect to Naoqi at ip \"" + args.ip + "\" on port " + str(args.port) +".\n"
"Please check your script arguments. Run with -h option for help.")
sys.exit(1)
main(session)
