ALRedBallDetection¶
NAOqi Vision - Overview | API
What it does¶
ALRedBallDetection is a module that provides a fast vision based red ball detector.
How it works¶
ALRedBallDetection is based on the detection of red pixels in the image given by the camera. These pixels are filtered depending on their distance to the red value in the YUV colorspace, using a threshold that was computed to allow the detection even with changing light conditions. Then, from all the detected set of red pixels, only the ones that define a circular shape are kept.
When a set of pixels is found on the current image, the ALMemory key redBallDetected is updated.
This key is organized as follows:
[
TimeStamp,
BallInfo,
CameraPose_InTorsoFrame,
CameraPose_InRobotFrame,
Camera_Id
]
TimeStamp: this field is the time stamp of the image that was used to perform the detection.
TimeStamp [
TimeStamp_Seconds,
Timestamp_Microseconds
]
BallInfo
BallInfo [
centerX,
centerY,
sizeX,
sizeY
]
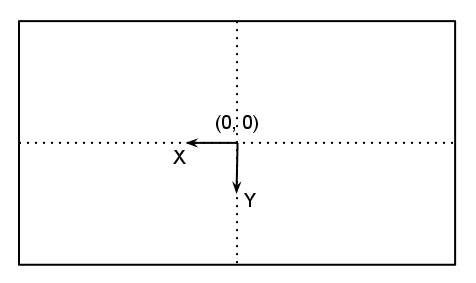
- centerX and centerY are the angular coordinates of the center of the ball in angles (radians).
- sizeX and sizeY are the ball “horizontal and vertical radius” in angles (radians).
The origin of the angles is the middle of the image. centerX corresponds to the direct (counter-clockwise) rotation along the Z axis, and centerY corresponds to the direct rotation along the Y axis, as in the image below:
CameraPose_InTorsoFrame: describes the Position6D of the camera at the time the image was taken, in FRAME_TORSO.
CameraPose_InRobotFrame: describes the Position6D of the camera at the time the image was taken, in FRAME_ROBOT.
Camera_Id: gives the Id of the camera used for the detection (0 for the top camera, 1 for the bottom camera).
Performances and Limitations¶
The detection is limited to objects that are approximatively red and circular. Balls of other colors cannot be detected.
Getting started¶
The easiest way to get started with ALRedBallDetection is to use the Red Ball Tracker Choregraphe Box.