Former 3D Sensor¶
See also
V18 | V18A
3D Sensor¶
One 3D camera is located in the forehead. It provides image resolution up to 320x240 at 20 frames per second.
Specifications¶
| Camera | Model | ASUS XTION |
| Type | SOC Image Sensor | |
| Imaging Array | Optical format | 1/2 inch (5:4) |
| Active Pixels (HxV) | 1280x1024 | |
| Sensitivity | Pixel size | 5.2µm*5.2µm |
| Dynamic range | 68.2db |
|
| Signal/Noise ratio (max) | 45dB | |
| Responsivity | 2.1 V/Lux-sec | |
| Output | Camera output | 320*240@20fps |
| Data Format | Depth color space (mm) | |
| Shutter type | Electronic Rolling shutter (ERS) | |
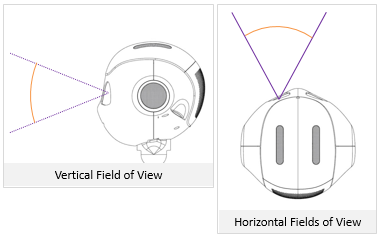
| View | Field of view | 70.0°DFOV (58.0°HFOV,45.0°VFOV) |
| Focus range | 40cm ~ 8m | |
| Focus type | Fixed focus |
Parameters¶
The camera has a list of parameters which can be modified.
Model¶
Camera Model has the following value:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kXTION | 4 | 3D Camera |
Supported parameters¶
Software parameters¶
| Parameter | Min value | Max value | Default value | Camera ID name | ID value |
|---|---|---|---|---|---|
| Keep Alive | 0 | 1 | 0 | kCameraKeepAliveID | 35 |
Hardware parameters¶
| Parameter | Min value | Max value | Default Value | Camera ID name | ID value |
|---|---|---|---|---|---|
| Resolution | kQQVGA | kVGA | kQVGA | kCameraResolutionID | 14 |
| Frames Per Second | 1 | 20 | 1 | kCameraFrameRateID | 15 |
Supported colorspaces¶
A color space is a model describing the way to represent color as an ordered list of numbers. For example you can represent the color of each pixel of your screen as a list of three elements R, G and B. Which are respectively the value of Red, Green, and Blue usually stored in an byte (range from 0 to 255).
Setting the color space allows you to set the image buffer encoding in
AL::ALImage.
Color space parameter for 3D camera can have the following values:
| Parameter ID Name | ID Value |
|
Number of channels | Description |
|---|---|---|---|---|
| AL::kYuvColorSpace | 0 | 1 | 1 | Contains the depth image clamped from 400m to 3.68m scaled in range [0,255], equivalent to one unsigned char |
| AL::kRGBColorSpace | 11 | 3 | 3 | Contains the depth image in false-color (RGB) equivalent to three unsigned char (debug purpose) |
| AL::kDepthColorSpace | 17 | 2 | 1 | Contains the distance in mm from the image plan corrected, equivalent to one unsigned short |
| AL::kXYZColorSpace | 19 | 12 | 3 | Contains the position in meter of the voxel in the camera frame, equivalent to three float |
| AL::kDistanceColorSpace | 21 | 2 | 1 | Contains the distance from the camera in mm, equivalent to one unsigned short |
| AL::kRawDepthColorSpace | 23 | 2 | 1 | Contains the raw distance in mm from the image plan without correction, equivalent to one unsigned short |
Supported resolutions¶
Resolution parameter can have the following values:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kQQQQVGA | 8 | Image of 40*30px |
| AL::kQQQVGA | 7 | Image of 80*60px |
| AL::kQQVGA | 0 | Image of 160*120px |
| AL::kQVGA | 1 | Image of 320*240px |
Supported framerates¶
Here a list of supported frame rates according to resolution set.
| Resolution | Supported Frame rate |
|---|---|
| AL::kQQQQVGA | from 1 to 20 fps |
| AL::kQQQVGA | from 1 to 20 fps |
| AL::kQQVGA | from 1 to 20 fps |
| AL::kQVGA | from 1 to 20 fps |