3D Sensor¶
See also
V18 | V18A
Reconstructed 3D Sensor¶
One 3D camera is located in the forehead. It provides image resolution up to 1280x720 at 15 frames per second.
Location¶
One 2D camera is located behind each eyes from which 3D is reconstructed, using left eye as referential.
See the URDF files.
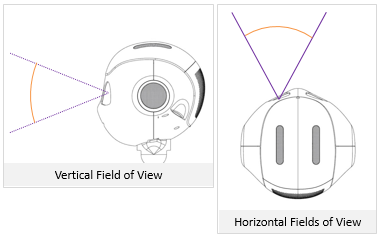
| Name | Horizontal Field of View | Vertical Field of View |
|---|---|---|
| CameraDepth | 72.00° | 58.00° |
Specifications¶
The stereo depth camera is a virtual camera build on stereo camera.
Parameters¶
The dual camera has a list of parameters which can be modified.
Model¶
Camera Model has the following value:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kStereo | 7 | Depth Camera |
Supported parameters¶
Software parameters¶
| Parameter | Min value | Max value | Default value | Camera ID name | ID value | Remarks |
|---|---|---|---|---|---|---|
| Keep Alive | 0 | 1 | 0 | kCameraKeepAliveID | 35 | |
| Disparity Window | 5 | 43 | 21 | kCameraDisparityWindowSizeID | 42 | Must be odd |
Supported colorspaces¶
A color space is a model describing the way to represent color as an ordered list of numbers. For example you can represent the color of each pixel of your screen as a list of three elements R, G and B. Which are respectively the value of Red, Green, and Blue usually stored in an byte (range from 0 to 255).
Setting the color space allows you to set the image buffer encoding in
AL::ALImage.
Color space parameter for 3D camera can have the following values:
| Parameter ID Name | ID Value |
|
Number of channels | Description |
|---|---|---|---|---|
| AL::kYuvColorSpace | 0 | 1 | 1 | Contains the depth image clamped from 400m to 3.68m scaled in range [0,255], equivalent to one unsigned char |
| AL::kRGBColorSpace | 11 | 3 | 3 | Contains the depth image in false-color (RGB) equivalent to three unsigned char (debug purpose) |
| AL::kDepthColorSpace | 17 | 2 | 1 | Contains the distance in mm from the image plan corrected, equivalent to one unsigned short |
| AL::kXYZColorSpace | 19 | 12 | 3 | Contains the position in meter of the voxel in the camera frame, equivalent to three float |
| AL::kDistanceColorSpace | 21 | 2 | 1 | Contains the distance from the camera in mm, equivalent to one unsigned short |
| AL::kRawDepthColorSpace | 23 | 2 | 1 | Contains the raw distance in mm from the image plan without correction, equivalent to one unsigned short |
Supported Format¶
Format parameter can have the following values:
| Resolution ID Name |
|
FrameRate Value | Description |
|---|---|---|---|
| AL::k720p | 5 | 10 or 15 | Image of 1280x720px |
| AL::kQ720p | 9 | 10 or 15 | Image of 640x360px |
| AL::kQQ720p | 10 | 10 or 15 | Image of 320x180px |
| AL::kQQQ720p | 11 | 10 or 15 | Image of 160x90px |
| AL::kQQQQ720p | 12 | 10 or 15 | Image of 80x45px |