Motors¶
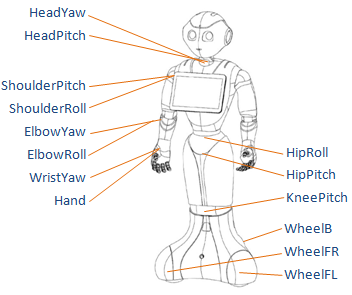
Location¶
Motors¶
Pepper 1.8¶
| Motor type 1 | Motor type 2 | Motor type 3 | Motor type 4 | Motor type 5 | Motor type 6 | |
|---|---|---|---|---|---|---|
| Family | Brush DC Coreless | BLDC (Brushless DC) | ||||
| Model | SE24P2CTCA | SE24M1RTCA | SE15KOVTTLA | EC-45_50W | EC45_70W | FL45BLW27 |
| No load speed (rpm) | 5 715 | 8 459 | 7 310 | 4 730 | 6 110 | 6 110 |
| Torque constant (mNm/A) | 27.5 | 19.2 | 21.2 | 47.5 | 36.9 | 36.9 |
| Stall torque (mNm) | 122.9 | 61.7 | 14.71 | 402 | 1460 | 780 |
| Max Continuous torque (mNm) | 42.9 | 23.8 | 3.68 | 69.6 | 128 | 130 |
| Speed Reduction ratio | 101.3 | 118.1 | Type A: 50.61 | 108.33 | 108.33 | 25 |
| Type B: 36.24 | ||||||
Head¶
| Joint | Motor |
| HeadYaw | Type 1 |
| HeadPitch | Type 2 |
Arms¶
| Joint | Motor |
| ShoulderPitch | Type 1 |
| ShoulderRoll | Type 2 |
| ElbowYaw | Type 1 |
| ElbowRoll | Type 2 |
Hands¶
| Joint / Actuator | Motor | Reduction ratio |
| WristYaw | Type 3 | Type A |
| Hand | Type 3 | Type B |
Leg¶
| Joints | Motor |
| HipRoll | Type 4 |
| HipPitch | Type 5 |
| KneePitch | Type 5 |
| WheelFL | Type 6 |
| WheelFR | Type 6 |
| WheelB | Type 6 |
Former versions¶
| Motor type 1 | Motor type 2 | Motor type 3 | Motor type 4 | Motor type 5 | |
|---|---|---|---|---|---|
| Family | Brush DC Coreless | BLDC (Brushless DC) | |||
| Model | SE24P2CTCA | SE24M1RTCA | 17N88208E | EC-45_50W | EC45_70W |
| No load speed (rpm) | 5 715 | 8 459 | 8 400 | 4 730 | 6 110 |
| Torque constant (mNm/A) | 27.5 | 19.2 | 20.1 | 47.5 | 36.9 |
| Stall torque (mNm) | 122.9 | 61.7 | 9.4 | 402 | 1460 |
| Max Continuous torque (mNm) | 42.9 | 23.8 | 4.9 | 69.6 | 128 |
| Speed Reduction ratio - Type A | 101.3 | 118.1 | 50.61 | 108.33 | 108.33 |
| Speed Reduction ratio - Type B | 36.24 | 25 | |||
Head¶
| Joint | Motor | Reduction ratio |
| HeadYaw | Type 1 | Type A |
| HeadPitch | Type 2 | Type A |
Arms¶
| Joint | Motor | Reduction ratio |
| ShoulderPitch | Type 1 | Type A |
| ShoulderRoll | Type 2 | Type A |
| ElbowYaw | Type 1 | Type A |
| ElbowRoll | Type 2 | Type A |
Hands¶
| Joint / Actuator | Motor | Reduction ratio |
| WristYaw | Type 3 | Type A |
| Hand | Type 3 | Type B |
Leg¶
| Joints | Motor | Reduction ratio |
| HipRoll | Type 4 | Type A |
| HipPitch | Type 5 | Type A |
| KneePitch | Type 5 | Type A |
| WheelFL | Type 5 | Type B |
| WheelFR | Type 5 | Type B |
| WheelB | Type 5 | Type B |