Stereo Camera¶
V18 only
Stereo Camera¶
The pair of 2D cameras, located behind the eyes, provides images in stereo.
Specifications¶
The stereo camera is composed of two identical sensors.
| Camera | Model | OV4689 |
| Type | SOC Image Sensor | |
| Imaging Array | Resolution | 4Mp |
| Optical format | 1/3 inch | |
| Active Pixels (HxV) | 1280x720 | |
| Sensitivity | Pixel size | 2µm*2µm |
| Dynamic range | 64.6db@1x gain |
|
| Signal/Noise ratio (max) | 38.3 dB | |
| Responsivity | 1900 mV/Lux-sec | |
| Output | Camera output | 2560*720@15fps |
| Data Format | YUV422 color space | |
| Shutter type | Rolling shutter / frame exposure | |
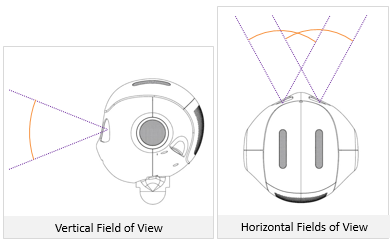
| View | Nominal Field of view | 96°HFOV, 60°VFOV |
| Focus range | 40cm ~ infinity | |
| Focus type | Fixed focus |
Parameters¶
The dual camera has a list of parameters which can be modified.
Model¶
Camera Model has the following value:
| Parameter ID Name | ID Value | Description |
|---|---|---|
| AL::kOV4689 | 8 | Stereo Camera |
Supported parameters¶
Software parameters¶
| Parameter | Min value | Max value | Default value | Camera ID name | ID value |
|---|---|---|---|---|---|
| Keep Alive | 0 | 1 | 0 | kCameraKeepAliveID | 35 |
Hardware parameters¶
| Parameter | Min Value | Max Value | Default Value | Camera ID name | ID Value | Remarks |
|---|---|---|---|---|---|---|
| Brightness | 0 | 8 | 4 | kCameraBrightnessID | 0 | |
| Contrast | 0 | 8 | 4 | kCameraContrastID | 1 | |
| Saturation | 0 | 8 | 4 | kCameraSaturationID | 2 | |
| Hue | 0 | 11 | 0 | kCameraHueID | 3 | |
| Gain | 0 | 1024 | NA | kCameraGainID | 6 | Read only if auto exposure enabled |
| Horizontal Flip | 0 | 1 | 0 | kCameraHFlipID | 7 | |
| Vertical Flip | 0 | 1 | 0 | kCameraVFlipID | 8 | |
| Auto Exposition | 0 | 1 | 1 | kCameraAutoExpositionID | 11 | |
| Auto White Balance | 0 | 1 | 1 | kCameraAutoWhiteBalanceID | 12 | |
| Exposure | 0 | 1024 | NA | kCameraExposureID | 17 | Read only if auto exposure enabled |
Supported colorspaces¶
A color space is a model describing the way to represent color as an ordered list of numbers. For example you can represent the color of each pixel of your screen as a list of three elements R, G and B. Which are respectively the value of Red, Green, and Blue usually stored in an byte (range from 0 to 255).
Setting the color space allows you to set the image buffer encoding in
AL::ALImage.
Color space parameter for 2D camera can have the following values:
| Parameter ID Name | ID Value | Number of layers | Number of channels | Description |
|---|---|---|---|---|
| AL::kYuvColorSpace | 0 | 1 | 1 | Buffer only contains the Y (luma component) equivalent to one unsigned char |
| AL::kyUvColorSpace | 1 | 1 | 1 | Buffer only contains the U (Chrominance component) equivalent to one unsigned char |
| AL::kyuVColorSpace | 2 | 1 | 1 | Buffer only contains the V (Chrominance component) equivalent to one unsigned char |
| AL::kRgbColorSpace | 3 | 1 | 1 | Buffer only contains the R (Red component) equivalent to one unsigned char |
| AL::krGbColorSpace | 4 | 1 | 1 | Buffer only contains the G (Green component) equivalent to one unsigned char |
| AL::krgBColorSpace | 5 | 1 | 1 | Buffer only contains the B (Blue component) equivalent to one unsigned char |
| AL::kHsyColorSpace | 6 | 1 | 1 | Buffer only contains the H (Hue component) equivalent to one unsigned char |
| AL::khSyColorSpace | 7 | 1 | 1 | Buffer only contains the S (Saturation component) equivalent to one unsigned char |
| AL::khsYColorSpace | 8 | 1 | 1 | Buffer only contains the Y (Brightness component) equivalent to one unsigned char |
| AL::kYUV422ColorSpace | 9 | 2 | 2 | Native format, 0xY’Y’VVYYUU equivalent to four unsigned char for two pixels. With Y luma for pixel n, Y’ luma for pixel n+1, and U and V are the average chrominance value of both pixels. |
| AL::kYUVColorSpace | 10 | 3 | 3 | Buffer contains triplet on the format 0xVVUUYY, equivalent to three unsigned char |
| AL::kRGBColorSpace | 11 | 3 | 3 | Buffer contains triplet on the format 0xBBGGRR, equivalent to three unsigned char |
| AL::kHSYColorSpace | 12 | 3 | 3 | Buffer contains triplet on the format 0xYYSSHH, equivalent to three unsigned char |
| AL::kBGRColorSpace | 13 | 3 | 3 | Buffer contains triplet on the format 0xRRGGBB, equivalent to three unsigned char |
| AL::kYYCbCrColorSpace | 14 | 2 | 2 | TIFF format, four unsigned characters for two pixels. |
| AL::kH2RGBColorSpace | 15 | 3 | 3 | H from “HSY to RGB” in fake colors. |
| AL::kHSMixedColorSpace | 16 | 3 | 3 | HS and (H+S)/2. |
Supported Format¶
Format parameter can have the following values:
| Resolution ID Name |
|
FrameRate Value | Description |
|---|---|---|---|
| AL::k720px2 | 13 | 10 or 15 | Image of 2560x720px |
| AL::kQ720px2 | 14 | 10 or 15 | Image of 1280x360px |
| AL::kQQ720px2 | 15 | 10 or 15 | Image of 640x180px |
| AL::kQQQ720px2 | 16 | 10 or 15 | Image of 320x90px |
| AL::kQQQQ720px2 | 17 | 10 or 15 | Image of 160x45px |
Note
The camera OV4689 can only run internally in 720px2 or Q720px2, otherwise scale down is performed (without binning or linear interpolation).