External-collision avoidance¶
NAOqi Motion - Overview | API
What it does¶
The aim is to avoid damaging the robot, its environment, and first of all avoid hurting people.
Arms anticollision, and move anticollision aim to avoid bumping into something or someone.
This implies checking the environment with the metrical sensors of the robot in order to see if an arm or the base is not going to hit something or someone:
- Arm velocity clipping: The articular max velocity of one arm may be clipped
if something is too close to this arm. If the person or the object is really too
close to the arm, the authorized velocity is nearly zero. A memory event called
ALMotion/Safety/ChainVelocityClipped()is raised when max velocity is clipped. - Secure Move API: If you try to launch a move with a motion API, in case
there is a blocking obstacle in the direction of the move, this move will not
be launched or will be stopped as soon as an obstacle enters its security zone
and you will get a warning. A memory event called
ALMotion/MoveFailed()is raised when a move is stopped or not launched.
How it works¶
Warning
This reflexes need ALNavigation module to run. So this features are only available if ALNavigation module is running.
ALNavigation module provides obstacle descriptions and ALMotion module defines if an obstacle is too close, in which case it activates the corresponding reflex.
While moving, the robot tries to detect obstacles, using all its sensors. As soon as an obstacle enters its security area, the robot stops.
 NAO¶
NAO¶
Security distances¶
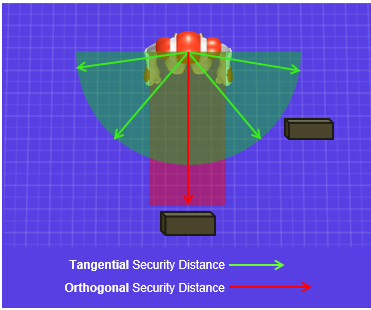
Tangential (or low speed)¶
The ALMotionProxy::setTangentialSecurityDistance sets the
minimum distance between the robot and any obstacle during a move.
For example if you set a Tangential security distance of 0.5m, the robot cannot move closer than 0.5m to an obstacle.
Orthogonal (and full speed)¶
The ALMotionProxy::setOrthogonalSecurityDistance sets the
minimum distance the robot can approach an obstacle while moving at full speed.
For example, if you have set an Orthogonal security distance of 1m and the robot is moving directly toward an obstacle at full speed, the robot will stop at 1m in front of the obstacle.
 Pepper¶
Pepper¶
Move security distances¶
ALMotion tangential security distance is the minimum distance between any point of the robot and any obstacle during a move. Its default value is 0.1m on Pepper.
ALMotion orthogonal security distance is the frontal distance at which the robot will stop when moving directly towards an obstacle at full speed. Its default value is 0.4m on Pepper.
At any time, the frontal distance at which the robot will stop when moving directly towards an obstacle is proportional to the robot stopping distance. It lies between the tangential security distance and the orthogonal security distance. The following table shows the frontal security distance at different speeds on Pepper, with default security distance parameters.
| Speed (m/s) | Frontal security distance (m) |
|---|---|
| 0.1 (min) | 0.12 |
| 0.2 | 0.17 |
| 0.3 | 0.25 |
| 0.35 (default) | 0.30 |
| 0.4 | 0.35 |
| 0.5 | 0.40 |
| 0.55 (max) | 0.40 |
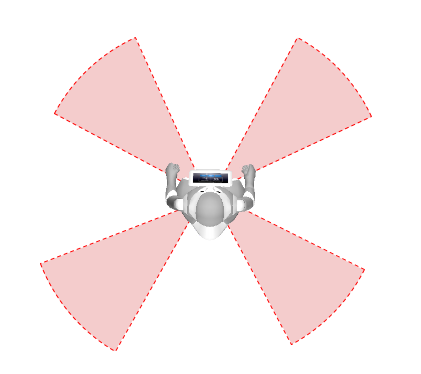
Blind zones¶
The sensor equipment of the robot does not allow to perceive the environment 360° round. Between the different sensors, there are some “blind” zones.
There are four main “blind zones” in which the robot cannot detect anything without moving its base or its head. Note that bumper can detect obstacles in contact with the robot. They are presented in the following figure.
In order to avoid dangerous movements in the blind zones, the arm speed is reduced when moving inside an unknown zone. The robot can then collide with an obstacle but it is not dangerous as the speed is low.
An unknown zone is an area in which there is no information about to presence of obstacles.
They are defined between the fields of view of the lasers in front and betwen the lasers and the sonar in the back.
All the blind zones are updated by ALNavigation when safety is enabled. If no obstacle is detected inside the zone and if some unknown space remain inside the zone, then the zone is unknown.
Every known space is slowly becoming unknown in a specified time (5s by default) when it is out of every sensors field of view. This means that if the robot does not move, the blind zones will become unknown in 5s maximum.
The update of those blind zones consist in moving them closer or further away from the robot. By default, an unknown zone starts 0.2m away from the robot, and a known one starts 1.0m away from the robot.
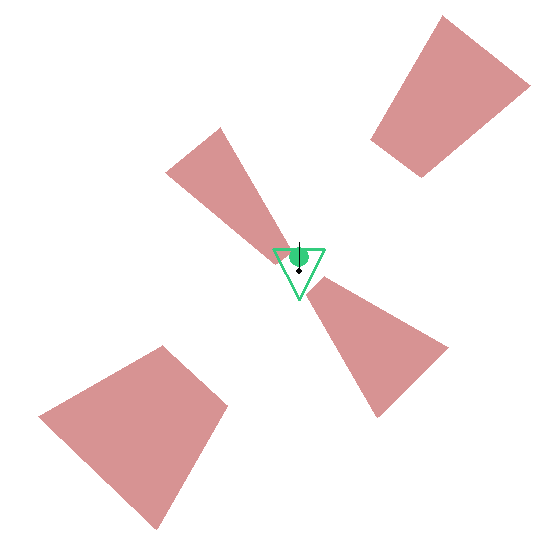
The following picture shows in red the regions in which the arm speed is reduced. The top-left and bottom-right zones are unknown, hence closer to the robot to ensure that the arms won’t collide with any undetected obstacle. The top-right and bottom-left zones are known, because of a recent movement with the base (laser sensor) or with the head (3D sensor). The zones are hence further away from the robot so the arms are not being slowered when moving through it.
Performances and limitations¶
Surroundings map¶
The robot may lose sight of an obstacle, if a sensor is obstructed or if the obstacle gets out of its field of view.
However, a surroundings map, limited in space and time, allows the robot to keep in mind that, potentially, an obstacle is still there.
Use case¶
- Avoid collision with environment pending a move.
- Avoid arms collision with environment.