Sonars¶
Location¶
See the URDF file.
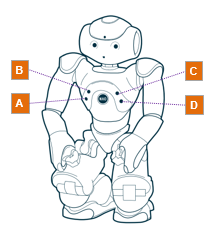
| Part | Sonar name | Part | Sonar name | ||
|---|---|---|---|---|---|
| B | Sonar/Right | Transmitter | C | Sonar/Left | Transmitter |
| A | Receiver | D | Receiver |
To access values by using ALMemory key names, see: Sonar Actuator and Sensors.
Specifications¶
Sonar: 2 emitters, 2 receivers.
NAO is equipped with two ultrasonic sensors (or sonars) which allow it to estimate the distance to obstacles in its environment.
Frequency: 40kHz
Resolution: 1cm-4cm (depending on distance)
Detection range: 0.20 m - 0.80 m
Under 20 cm there is no distance information, the robot only knows that an object is present.
Above 80 cm the value returned is an estimation. For further details, read the important tips in US/Sensor (m).
Effective cone: 60°