Connectivity¶
Ethernet¶
Main usage¶
Setting the WiFi connection.
Specification¶
1×RJ45 - 10/100/1000 base T.
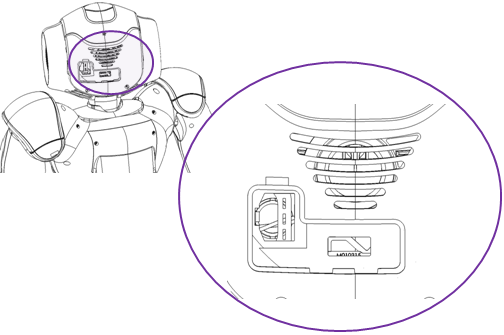
Location¶
- Ethernet port
- To access to the Ethernet port, remove the hatch behind the head of the robot.
USB¶
Main usage¶
Usually used to update the system of the robot, you can also use the USB port to connect external devices such as:
- Kinect or Asus 3D sensor, or
- Arduino device. See an example of implementation provided by our partner: http://www.humarobotics.com/en/robotics-lab/nao-and-arduino.html
Location¶
- USB port
- To access to the USB port, remove the hatch behind the head of the robot.
- Hatch behind the head of the robot