Speed Reduction ratio
For each motor, there are several types of speed reduction ratio:
| |
Motor type 1 |
Motor type 2 |
Motor type 3 |
Motor type 4 |
|---|
| Type A |
201.3 |
50.61 |
150.27 |
150.27 |
| Type B |
130.85 |
36.24 |
173.22 |
|
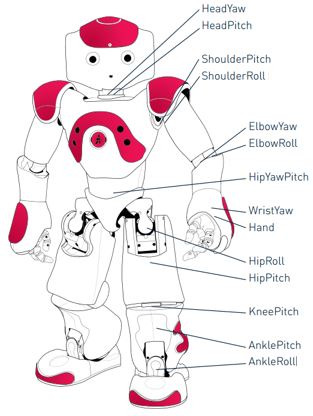
Head
| Joint |
Motor |
Reduction ratio |
| HeadYaw |
Type 3 |
Type A |
| HeadPitch |
Type 3 |
Type B |
Arms
| Joint |
Motor |
Reduction ratio |
| ShoulderPitch |
Type 3 or Type 4 |
Type A |
| ShoulderRoll |
Type 3 |
Type B |
| ElbowYaw |
Type 3 |
Type A |
| ElbowRoll |
Type 3 |
Type B |
Hands
| Joint / Actuator |
Motor |
Reduction ratio |
| WristYaw |
Type 2 |
Type A |
| Hand |
Type 2 |
Type B |
Legs
| Joint |
Motor |
Reduction ratio |
| HipYawPitch |
Type 1 |
Type A |
| HipRoll |
Type 1 |
Type A |
| HipPitch |
Type 1 |
Type B |
| KneePitch |
Type 1 |
Type B |
| AnklePitch |
Type 1 |
Type B |
| AnkleRoll |
Type 1 |
Type A |