Versions and Body Types¶
NAO - Version¶
Many upgrade of NAO body type exist.
They can be differentiated with the head’s back design.
| Version | Back design |
|---|---|
| V5 | 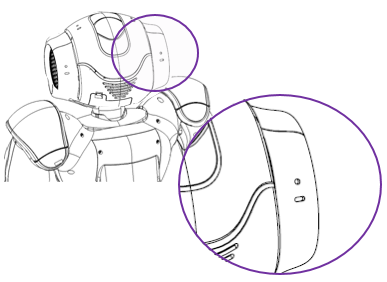
|
| V4 | 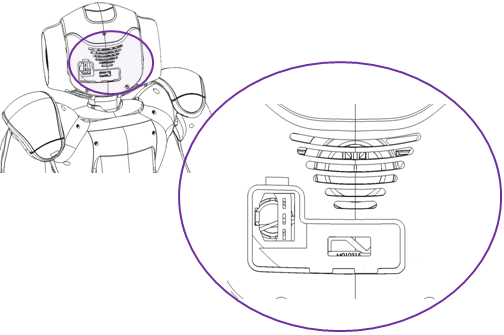
|
| V3.3 | 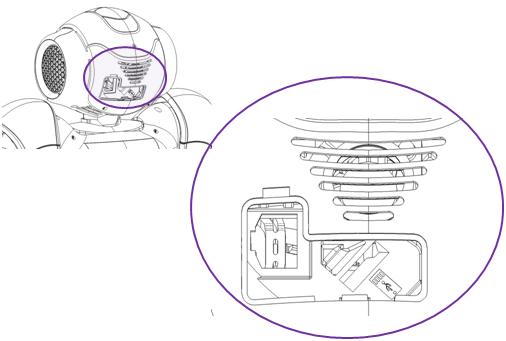
|
| V3+, V3.2 | 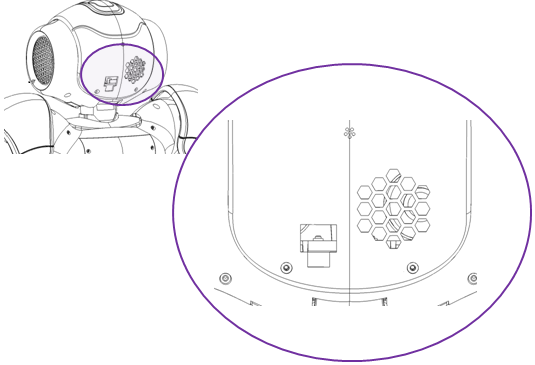
|
Programmatic access to version and body type¶
To retrieve dynamically the body type and version of the robot, use the ALRobotModel module:
#! /usr/bin/env python
# -*- encoding: UTF-8 -*-
"""Example: Use ALRobotModel Module"""
import qi
import argparse
import sys
def main(session):
"""
This example uses the ALRobotModel module.
"""
# Get the service ALRobotModel.
model_service = session.service("ALRobotModel")
# Example showing how to get information about the robot model
print("robot type", model_service.getRobotType()) # "Nao", "Juliette" or "Romeo"
print("has arms", model_service.hasArms())
print("has hands", model_service.hasHands())
print("has legs", model_service.hasLegs())
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument("--ip", type=str, default="127.0.0.1",
help="Robot IP address. On robot or Local Naoqi: use '127.0.0.1'.")
parser.add_argument("--port", type=int, default=9559,
help="Naoqi port number")
args = parser.parse_args()
session = qi.Session()
try:
session.connect("tcp://" + args.ip + ":" + str(args.port))
except RuntimeError:
print ("Can't connect to Naoqi at ip \"" + args.ip + "\" on port " + str(args.port) +".\n"
"Please check your script arguments. Run with -h option for help.")
sys.exit(1)
main(session)