Legend
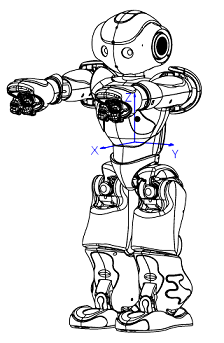
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.
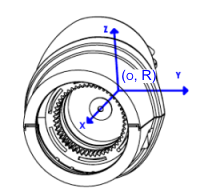
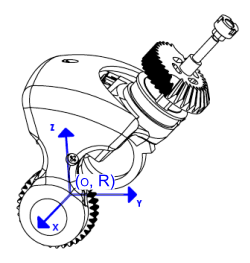
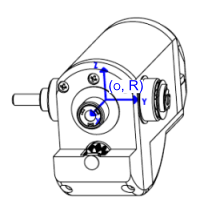
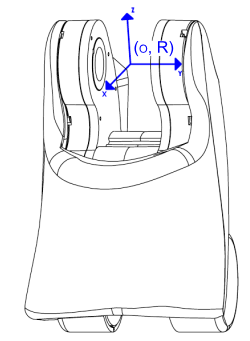
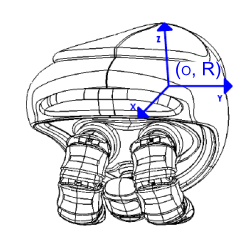
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards.
Arms
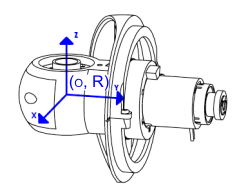
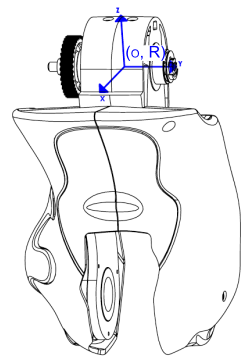
Right Shoulder
(o, R) is located on the joint: RShoulderPitch.
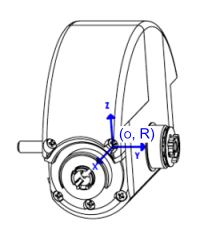
Left Shoulder
(o, R) is located on the joint: LShoulderPitch.
Right Bicep
(o, R) is located on the joint: RShoulderRoll.
Left Bicep
(o, R) is located on the joint: LShoulderRoll.
Right Elbow
(o, R) is located on the joint: RElbowYaw.
Left Elbow
(o, R) is located on the joint: LElbowYaw.
Right Motorized ForeArm
(o, R) is located on the joint: RElbowRoll.
Left Motorized ForeArm
(o, R) is located on the joint: LElbowRoll.
Legs
Right Pelvis
(o, R) is located on the joint: RHipYawPitch.
Left Pelvis
(o, R) is located on the joint: LHipYawPitch.
Right Hip
(o, R) is located on the joint: RHipRoll.
Left Hip
(o, R) is located on the joint: LHipRoll.
Right Thigh
(o, R) is located on the joint: RHipPitch.
Left Thigh
(o, R) is located on the joint: LHipPitch.
Right Tibia
(o, R) is located on the joint: RKneePitch.
Left Tibia
(o, R) is located on the joint: LKneePitch.
Right Ankle
(o, R) is located on the joint: RAnklePitch.
Left Ankle
(o, R) is located on the joint: LAnklePitch.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)


![CoM(S) = \left[
\begin{array}{c}
-0.00480 \\
+0.00000 \\
+0.04227
\end{array}
\right]_{(o, R)}](../../_images/math/52ede29269644a9f637061f515e2a13448b3e382.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00487953284 & +0.00001428591 & +0.00019545651 \\
+0.00001428591 & +0.00470360698 & -0.00002224589 \\
+0.00019545651 & -0.00002224589 & +0.00156713520
\end{array}
\right]_R](../../_images/math/d27b873a278f159bed960b546710a85dcf601c77.png)


![CoM(S) = \left[
\begin{array}{c}
-0.00003 \\
+0.00000 \\
-0.02573
\end{array}
\right]_{(o, R)}](../../_images/math/6bd35b40f3b06dda72085a997353bafa103d6c9b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00006223368 & -0.00000000042 & -0.00000007448 \\
-0.00000000042 & +0.00006324431 & -0.00000010416 \\
-0.00000007448 & -0.00000010416 & +0.00000549462
\end{array}
\right]_R](../../_images/math/65d84e32cd1b89f07a6a1f8807082235dd91cc3e.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00383 \\
+0.00000 \\
+0.05156
\end{array}
\right]_{(o, R)}](../../_images/math/23eac6de4fed72923921faff63298ef7e3d4ce80.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00208895741 & -0.00000549094 & -0.00011339950 \\
-0.00000549094 & +0.00193222263 & +0.00002803917 \\
-0.00011339950 & +0.00002803917 & +0.00082257793
\end{array}
\right]_R](../../_images/math/fa359e6cfb5c2f0c5eddb10c28ffb9dcc43142c9.png)

![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
+0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/01bdb0c01064c22e563ef97f19273f662bfebfed.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & +0.00000202458 & +0.00000001713 \\
+0.00000202458 & +0.00001404920 & +0.00000004410 \\
+0.00000001713 & +0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/431a0f73094334f78ed9edcbf9e45665feb2ba4c.png)
![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
-0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/df3248aba93d167277003bdebb2f4626efe2a015.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & -0.00000202458 & +0.00000001713 \\
-0.00000202458 & +0.00001404920 & -0.00000004410 \\
+0.00000001713 & -0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/1255a742d2c5cc0d1cb867933604098ae9ae74b0.png)

![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
-0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/fd0c71f3f45188ff9f0d37e8bb01e9af58253c8d.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & +0.00000193929 & -0.00001564503 \\
+0.00000193929 & +0.00020221058 & +0.00000368731 \\
-0.00001564503 & +0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/4b4de5b2268c03126ccc32da005d72172347e80e.png)
![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
+0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/990602a55557e542a57953d19c67f44ee5649919.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & -0.00000193929 & -0.00001564503 \\
-0.00000193929 & +0.00020221058 & -0.00000368731 \\
-0.00001564503 & -0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/29d925ddf5729f87ca87ac69001ba7a1c35cb124.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
+0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/d9d4234c7e9af8e9431dbf95838462b6dcb58672.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & +0.00000002242 & +0.00000006771 \\
+0.00000002242 & +0.00006224789 & -0.00000000559 \\
+0.00000006771 & -0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/8cdd9b8abe49acc0bf45e4597edb91297e977a95.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
-0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/fc3fa8712ca697c313d9df08d533fb44282789b8.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & -0.00000002242 & +0.00000006771 \\
-0.00000002242 & +0.00006224789 & +0.00000000559 \\
+0.00000006771 & +0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/c0d0175fc6000cdf10ae4f2ddb53885c724b41ba.png)

![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
-0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/90a62a18bc1335f1af6f41608badbef2b597d713.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & +0.00000131460 & -0.00000143626 \\
+0.00000131460 & +0.00003056901 & +0.00000020686 \\
-0.00000143626 & +0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/d1e213f49766fa0746cc3aa781c5581d872adebf.png)
![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
+0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/56ff96a56b6dcb9c189145182224554deb1d911d.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & -0.00000131460 & -0.00000143626 \\
-0.00000131460 & +0.00003056901 & -0.00000020686 \\
-0.00000143626 & -0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/b30d14642ffbc98c3597ce6e8eaa2ebf073edc97.png)

![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
-0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/03dc360709cbe7b681f1861a2ce4b1181775d270.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & +0.00000822213 & +0.00001136287 \\
+0.00000822213 & +0.00027230907 & -0.00000181780 \\
+0.00001136287 & -0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/06471f8685654f5985fbba9d19ea41462602e565.png)
![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
+0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/b3754c59012c4a40f4f9afcc889a95cdbe3d777b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & -0.00000822213 & +0.00001136287 \\
-0.00000822213 & +0.00027230907 & +0.00000181780 \\
+0.00001136287 & +0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/918d6297e50e5ebc69ad85cc08c4cb0e002533fe.png)

![CoM(S) = \left[
\begin{array}{c}
-0.00717 \\
+0.01187\\
+0.02705
\end{array}
\right]_{(o, R)}](../../_images/math/a4d099595b9748acecc60c145c96395e73342140.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00009064495 & +0.00000488819 & +0.00001221925 \\
+0.00000488819 & +0.00010665780 & -0.00002783820 \\
+0.00001221925 & -0.00002783820 & +0.00006742859
\end{array}
\right]_R](../../_images/math/e5ff9214ef955bfb4fc3787dedb1e23aa6404a8e.png)
![CoM(S) = \left[
\begin{array}{c}
-0.00717 \\
-0.01187\\
+0.02705
\end{array}
\right]_{(o, R)}](../../_images/math/85b6c9777328e33faf9b4f0540fd0f3b13b6de58.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00009064495 & -0.00000488819 & +0.00001221925 \\
-0.00000488819 & +0.00010665780 & +0.00002783820 \\
+0.00001221925 & +0.00002783820 & +0.00006742859
\end{array}
\right]_R](../../_images/math/75d84bda2d85b3d3601497d8ac88c459ae490e0f.png)

![CoM(S) = \left[
\begin{array}{c}
-0.01649 \\
-0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/5212827512702bdcd14a92bfdeccb9f9d3abfa62.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00002791309 & -0.00000004982 & -0.00000530968 \\
-0.00000004982 & +0.00010146905 & -0.00000000049 \\
-0.00000530968 & -0.00000000049 & +0.00009209358
\end{array}
\right]_R](../../_images/math/72c75f01248da9ffe14296747d6fcc37d132e920.png)
![CoM(S) = \left[
\begin{array}{c}
-0.01649 \\
+0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/4e2a9bbe465263aaa1bba5d553ca9fac5871000e.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00002791309 & +0.00000004982 & -0.00000530968 \\
+0.00000004982 & +0.00010146905 & +0.00000000049 \\
-0.00000530968 & +0.00000000049 & +0.00009209358
\end{array}
\right]_R](../../_images/math/77da30189aa4b1128b97e53235ab9f0f5419e025.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00131 \\
-0.00201 \\
-0.05386
\end{array}
\right]_{(o, R)}](../../_images/math/e66406be51242279b8ad87cbe02b4fe1b4e6f2fa.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00166558985 & -0.00000043251 & +0.00008250512 \\
-0.00000043251 & +0.00162499686 & -0.00003174281 \\
+0.00008250512 & -0.00003174281 & +0.00030492852
\end{array}
\right]_{(o, R)}](../../_images/math/45a942773e1eaafc12fb0a0467f40f1b2efe9ea5.png)
![CoM(S) = \left[
\begin{array}{c}
+0.00131 \\
+0.00201 \\
-0.05386
\end{array}
\right]_{(o, R)}](../../_images/math/2980d23cafb882848de052210fa490b0d3d37242.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00166558985 & +0.00000043251 & +0.00008250512 \\
+0.00000043251 & +0.00162499686 & +0.00003174281 \\
+0.00008250512 & +0.00003174281 & +0.00030492852
\end{array}
\right]_{(o, R)}](../../_images/math/d908f5a0111b23e47395113f29be8ccb4fdd8fe4.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00471 \\
-0.00210 \\
-0.04891
\end{array}
\right]_{(o, R)}](../../_images/math/c067b7aa7076ce071612276bec621ec106516cd4.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00118033782 & -0.00000030542 & +0.00004017104 \\
-0.00000030542 & +0.00112927811 & -0.00003573639 \\
+0.00004017104 & -0.00003573639 & +0.00019349009
\end{array}
\right]_{(o, R)}](../../_images/math/1d2d513f91158519d995a7869dcb5e5d071c2d8e.png)
![CoM(S) = \left[
\begin{array}{c}
+0.00471 \\
+0.00210 \\
-0.04891
\end{array}
\right]_{(o, R)}](../../_images/math/6e17d41df66f609656b42b3f519decd04dddbaae.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00118033782 & +0.00000030542 & +0.00004017104 \\
+0.00000030542 & +0.00112927811 & +0.00003573639 \\
+0.00004017104 & +0.00003573639 & +0.00019349009
\end{array}
\right]_{(o, R)}](../../_images/math/b2ab9b5cca692ae2bcb3a373a2f12b6ef552ff07.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00142 \\
-0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/77e4ba5b383dca4e0407b5b60a4c7d8f1a247da2.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00003882578 & +0.00000004942 & +0.00000221321 \\
+0.00000004942 & +0.00007211579 & -0.00000000674 \\
+0.00000221321 & -0.00000000674 & +0.00005351987
\end{array}
\right]_{(o, R)}](../../_images/math/2ad8f46810ded7102af566fa6400eefb8da5445a.png)
![CoM(S) = \left[
\begin{array}{c}
+0.00142 \\
+0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/714545aa08e58c0f43f05c1d413667721b70fb5b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00003882578 & -0.00000004942 & +0.00000221321 \\
-0.00000004942 & +0.00007211579 & +0.00000000674 \\
+0.00000221321 & +0.00000000674 & +0.00005351987
\end{array}
\right]_{(o, R)}](../../_images/math/ab4e2750b5b842bfd0d4d8ae39798f7b50775729.png)


![CoM(S) = \left[
\begin{array}{c}
+0.02489 \\
-0.00330 \\
-0.03208
\end{array}
\right]_{(o, R)}](../../_images/math/e8ede99ee79d41316dd6ded10c666f31141d1faa.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00026759800 & +0.00000592718 & +0.00013729918 \\
+0.00000592718 & +0.00064314836 & -0.00001869769 \\
+0.00013729918 & -0.00001869769 & +0.00052649738
\end{array}
\right]_{(o, R)}](../../_images/math/a822dbae2eb9db0e717cd3d3e75cfa4221c58a42.png)
![CoM(S) = \left[
\begin{array}{c}
+0.02489 \\
+0.00330 \\
-0.03208
\end{array}
\right]_{(o, R)}](../../_images/math/a32d92ebf7760bbbbddae94f5a0365051cea6f63.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00026759800 & -0.00000592718 & +0.00013729918 \\
-0.00000592718 & +0.00064314836 & +0.00001869769 \\
+0.00013729918 & +0.00001869769 & +0.00052649738
\end{array}
\right]_{(o, R)}](../../_images/math/ba645f29d25873d95caae1515f48f77bdc290cae.png)
