T14 - Masses - V3.2¶
Warning
The Masses as well as the Center of Mass positions taken in account in the robot models have been updated in order to remove the slight dissymmetry between left and right limbs.
Legend¶
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)
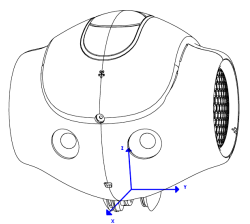
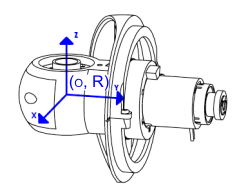
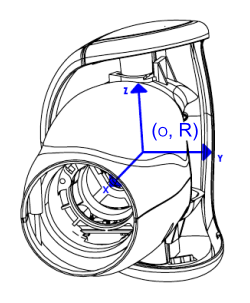
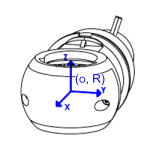
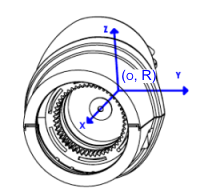
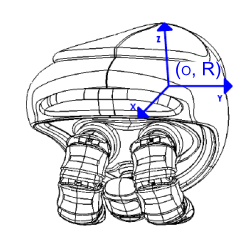
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: with straight arms pointing forwards.
Whole robot¶

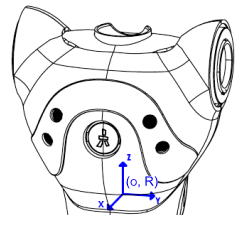

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00544 \\
0.00000 \\
-0.01049
\end{array}
\right]_{(o, R)}](../../_images/math/9177f7e0dbc11cbb306fd34a737481e3943637d4.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00407798983 & 0.00001905036 & -0.00009699419 \\
0.00001905036 & 0.00383666587 & -0.00000729520 \\
-0.00009699419 & -0.00000729520 & 0.00191346075 \\
\end{array}
\right]_R](../../_images/math/dbd6b63541c93cf3dabc427b433a5b36c69fefa6.png)


![CoM(S) = \left[
\begin{array}{c}
-0.00003 \\
+0.00000 \\
-0.02573
\end{array}
\right]_{(o, R)}](../../_images/math/6bd35b40f3b06dda72085a997353bafa103d6c9b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00006223368 & -0.00000000042 & -0.00000007448 \\
-0.00000000042 & +0.00006324431 & -0.00000010416 \\
-0.00000007448 & -0.00000010416 & +0.00000549462
\end{array}
\right]_R](../../_images/math/65d84e32cd1b89f07a6a1f8807082235dd91cc3e.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00383 \\
-0.00000 \\
+0.05156
\end{array}
\right]_{(o, R)}](../../_images/math/092d76bf23ca4d7e1b0edcd6a63d8a728af4d546.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00208895741 & -0.00000549094 & -0.00011339950 \\
-0.00000549094 & +0.00193222263 & +0.00002803917 \\
-0.00011339950 & +0.00002803917 & +0.00082257793
\end{array}
\right]_R](../../_images/math/fa359e6cfb5c2f0c5eddb10c28ffb9dcc43142c9.png)

![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
+0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/01bdb0c01064c22e563ef97f19273f662bfebfed.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & +0.00000202458 & +0.00000001713 \\
+0.00000202458 & +0.00001404920 & +0.00000004410 \\
+0.00000001713 & +0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/431a0f73094334f78ed9edcbf9e45665feb2ba4c.png)
![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
-0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/df3248aba93d167277003bdebb2f4626efe2a015.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & -0.00000202458 & +0.00000001713 \\
-0.00000202458 & +0.00001404920 & -0.00000004410 \\
+0.00000001713 & -0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/1255a742d2c5cc0d1cb867933604098ae9ae74b0.png)

![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
-0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/fd0c71f3f45188ff9f0d37e8bb01e9af58253c8d.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & +0.00000193929 & -0.00001564503 \\
+0.00000193929 & +0.00020221058 & +0.00000368731 \\
-0.00001564503 & +0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/4b4de5b2268c03126ccc32da005d72172347e80e.png)
![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
+0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/990602a55557e542a57953d19c67f44ee5649919.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & -0.00000193929 & -0.00001564503 \\
-0.00000193929 & +0.00020221058 & -0.00000368731 \\
-0.00001564503 & -0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/29d925ddf5729f87ca87ac69001ba7a1c35cb124.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
+0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/d9d4234c7e9af8e9431dbf95838462b6dcb58672.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & +0.00000002242 & +0.00000006771 \\
+0.00000002242 & +0.00006224789 & -0.00000000559 \\
+0.00000006771 & -0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/8cdd9b8abe49acc0bf45e4597edb91297e977a95.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
-0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/fc3fa8712ca697c313d9df08d533fb44282789b8.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & -0.00000002242 & +0.00000006771 \\
-0.00000002242 & +0.00006224789 & +0.00000000559 \\
+0.00000006771 & +0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/c0d0175fc6000cdf10ae4f2ddb53885c724b41ba.png)

![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
-0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/90a62a18bc1335f1af6f41608badbef2b597d713.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & +0.00000131460 & -0.00000143626 \\
+0.00000131460 & +0.00003056901 & +0.00000020686 \\
-0.00000143626 & +0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/d1e213f49766fa0746cc3aa781c5581d872adebf.png)
![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
+0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/56ff96a56b6dcb9c189145182224554deb1d911d.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & -0.00000131460 & -0.00000143626 \\
-0.00000131460 & +0.00003056901 & -0.00000020686 \\
-0.00000143626 & -0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/b30d14642ffbc98c3597ce6e8eaa2ebf073edc97.png)

![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
-0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/03dc360709cbe7b681f1861a2ce4b1181775d270.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & +0.00000822213 & +0.00001136287 \\
+0.00000822213 & +0.00027230907 & -0.00000181780 \\
+0.00001136287 & -0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/06471f8685654f5985fbba9d19ea41462602e565.png)
![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
+0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/b3754c59012c4a40f4f9afcc889a95cdbe3d777b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & -0.00000822213 & +0.00001136287 \\
-0.00000822213 & +0.00027230907 & +0.00000181780 \\
+0.00001136287 & +0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/918d6297e50e5ebc69ad85cc08c4cb0e002533fe.png)
