T14 - Masses¶
Warning
The Masses as well as the Center of Mass positions taken in account in the robot models have been updated in order to remove the slight dissymmetry between left and right limbs.
Legend¶
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)
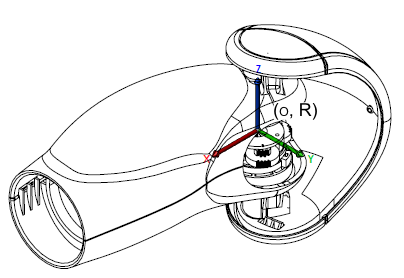
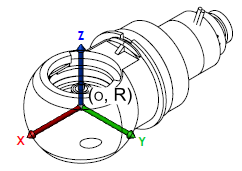
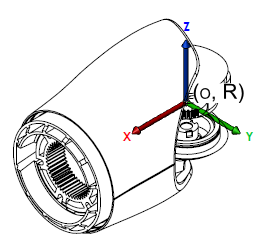
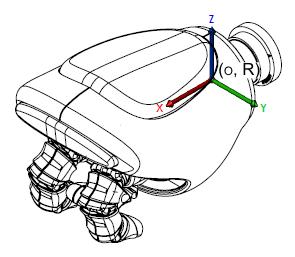
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: with straight arms pointing forwards.
Whole robot¶

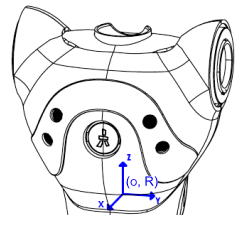

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00544 \\
0.00000 \\
-0.01049
\end{array}
\right]_{(o, R)}](../../_images/math/9177f7e0dbc11cbb306fd34a737481e3943637d4.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00407798983 & 0.00001905036 & -0.00009699419 \\
0.00001905036 & 0.00383666587 & -0.00000729520 \\
-0.00009699419 & -0.00000729520 & 0.00191346075 \\
\end{array}
\right]_R](../../_images/math/dbd6b63541c93cf3dabc427b433a5b36c69fefa6.png)
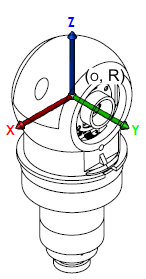

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00001 \\
0.00000 \\
-0.02742
\end{array}
\right]_{(o, R)}](../../_images/math/78bb3bb08d0702cfd535807e49f06202b5eeb765.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007499295 & +0.00000000157 & -0.00000001834 \\
+0.00000000157 & +0.00007599995 & -0.00000005295 \\
-0.00000001834 & -0.00000005295 & +0.00000553373 \\
\end{array}
\right]_R](../../_images/math/6333578da2bc6dcdafc0a52d5f90868ec2526d7f.png)
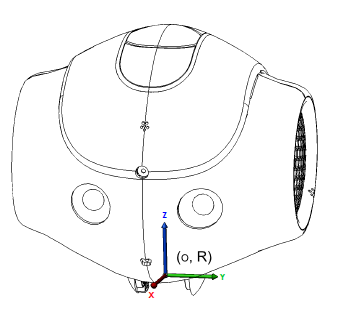

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00112 \\
0.00000 \\
0.05258
\end{array}
\right]_{(o, R)}](../../_images/math/9e5d61912ca494984cead434728dd2f69c5c0229.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00263129518 & +0.00000878814 & +0.00004098466 \\
+0.00000878814 & +0.00249112488 & -0.00002995792 \\
+0.00004098466 & -0.00002995792 & +0.00098573565 \\
\end{array}
\right]_R](../../_images/math/695668c9cb54a03960ca3a65e6a6cb3accf5fa1d.png)
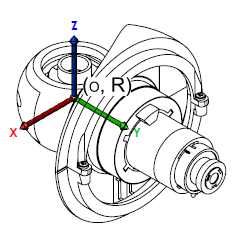

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165\\
0.02663\\
0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/630883efbb1b58a8269764de85abd3261bdc5e16.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.4284300101e-05 & 2.0280199351e-06 & 2.3380000158e-08\\
2.0280199351e-06 & 1.4155610188e-05 & 1.9719999855e-08\\
2.3380000158e-08 & 1.9719999855e-08 & 8.6419488071e-05\\
\end{array}
\right]_R](../../_images/math/4dd48cfbae2778fed99eebe461921067c03b83e1.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00165\\
-0.02663\\
0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/012e9af83e62e74926cc9472953461225954e804.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
8.4284300101e-05 & -2.0280199351e-06 & 2.3380000158e-08\\
-2.0280199351e-06 & 1.4155610188e-05 & -1.9719999855e-08\\
2.3380000158e-08 & -1.9719999855e-08 & 8.6419488071e-05\\
\end{array}
\right]_R](../../_images/math/8b5eaa9fe293825bbdbb2556dd658c2cc6a86452.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02455\\
-0.00563\\
0.0033
\end{array}
\right]_{(o, R)}](../../_images/math/709bde421834c583d1c7d889ba65a930b6991be6.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00011012030882 & 7.6691307186e-05 & -2.6046069252e-05\\
7.6691307186e-05 & 0.00036757651833 & 1.2098280422e-05\\
-2.6046069252e-05 & 1.2098280422e-05 & 0.00035461771768\\
\end{array}
\right]_R](../../_images/math/ee00ccbd8acb193d06a66908c19116064de52e24.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.02455\\
0.00563\\
0.0033
\end{array}
\right]_{(o, R)}](../../_images/math/98b8da71619b400ff2695414e5d35d2d6d106041.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
9.3899929198e-05 & -4.7144520067e-05 & -2.6994710424e-05\\
-4.7144520067e-05 & 0.00037151877768 & -2.4597700303e-06\\
-2.6994710424e-05 & -2.4597700303e-06 & 0.00034190082806\\
\end{array}
\right]_R](../../_images/math/3b527291f40ae27d93abc5fec0a35a047277c451.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02744\\
0\\
-0.00014
\end{array}
\right]_{(o, R)}](../../_images/math/e32203d8b7bdbcd32cc580fb046d1c160f0b5466.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
5.5971499933e-06 & 4.2099999042e-09 & 4.3189999133e-08\\
4.2099999042e-09 & 7.5433119491e-05 & -1.8400000412e-09\\
4.3189999133e-08 & -1.8400000412e-09 & 7.6443393482e-05\\
\end{array}
\right]_R](../../_images/math/a2b326114a5852252630cb2e0d2b1d49509b6cc1.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.02556\\
-0.00281\\
0.00076
\end{array}
\right]_{(o, R)}](../../_images/math/7f93a386fd2de9755ef7d70d549cf4646a8b7989.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.5390700102e-05 & 2.3324300855e-06 & -6.0116997247e-07\\
2.3324300855e-06 & 8.9220360678e-05 & 2.6940000453e-08\\
-6.0116997247e-07 & 2.6940000453e-08 & 8.7248430646e-05\\
\end{array}
\right]_R](../../_images/math/5dbcd30b37795808fbfb08ce5d09ab370d47088e.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.02556\\
0.00281\\
0.00076
\end{array}
\right]_{(o, R)}](../../_images/math/68a8fb61fc28940418a3619c4787c4af4424995e.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
2.5332199584e-05 & -2.3427101041e-06 & 7.4589998178e-08\\
-2.3427101041e-06 & 8.91321979e-05 & -2.6549999532e-08\\
7.4589998178e-08 & -2.6549999532e-08 & 8.7287262431e-05\\
\end{array}
\right]_R](../../_images/math/aea75412f4cb4212ae62565ec939ef363a7eb4ef.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.03434\\
0.00088\\
0.00308
\end{array}
\right]_{(o, R)}](../../_images/math/533f1a11654a37365cf56d3acdeb6779d99cefbf.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
7.0549329394e-05 & 5.715990028e-06 & -2.247437078e-05\\
5.715990028e-06 & 0.0003560623154 & 3.1777099139e-06\\
-2.247437078e-05 & 3.1777099139e-06 & 0.00035191932693\\
\end{array}
\right]_R](../../_images/math/12167afe1344d1e11bca33ba8c3f807b94678091.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.03434\\
-0.00088\\
0.00308
\end{array}
\right]_{(o, R)}](../../_images/math/76f1855dbf91ba7d847da939a2f6eaf2f3a9172b.png)
