T14 - Joints¶
Head joints¶
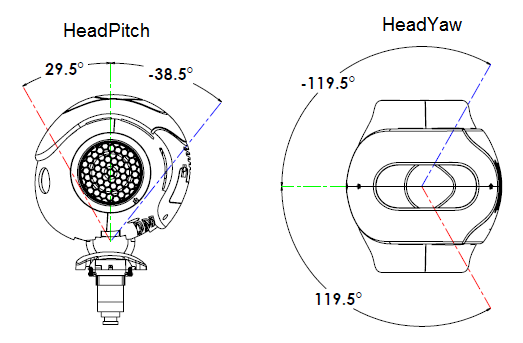
Motion range
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -38.5 to 29.5 | -0.6720 to 0.5149 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value
Device/SubDeviceList/HeadYaw/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value
Device/SubDeviceList/HeadYaw/Position/Sensor/Value
Anti collision limitation
Due to potential shell collision at the head level, the Pitch motion range is limited according to the Yaw value.
| HeadYaw | HeadPitch Min | HeadPitch Max | HeadYaw | HeadPitch Min | HeadPitch Max | |
|---|---|---|---|---|---|---|
| (degrees) | (radians) | |||||
| -119.52 | -25.73 | 18.91 | -2.086017 | -0.449073 | 0.330041 | |
| -87.49 | -18.91 | 11.46 | -1.526988 | -0.330041 | 0.200015 | |
| -62.45 | -24.64 | 17.19 | -1.089958 | -0.430049 | 0.300022 | |
| -51.74 | -27.50 | 18.91 | -0.903033 | -0.479965 | 0.330041 | |
| -43.32 | -31.40 | 21.20 | -0.756077 | -0.548033 | 0.370010 | |
| -27.85 | -38.50 | 24.18 | -0.486074 | -0.671951 | 0.422021 | |
| 0.0 | -38.50 | 29.51 | 0.000000 | -0.671951 | 0.515047 | |
| 27.85 | -38.50 | 24.18 | 0.486074 | -0.671951 | 0.422021 | |
| 43.32 | -31.40 | 21.20 | 0.756077 | -0.548033 | 0.370010 | |
| 51.74 | -27.50 | 18.91 | 0.903033 | -0.479965 | 0.330041 | |
| 62.45 | -24.64 | 17.19 | 1.089958 | -0.430049 | 0.300022 | |
| 87.49 | -18.91 | 11.46 | 1.526988 | -0.330041 | 0.200015 | |
| 119.52 | -25.73 | 18.91 | 2.086017 | -0.449073 | 0.330041 | |
Left Arm joints¶
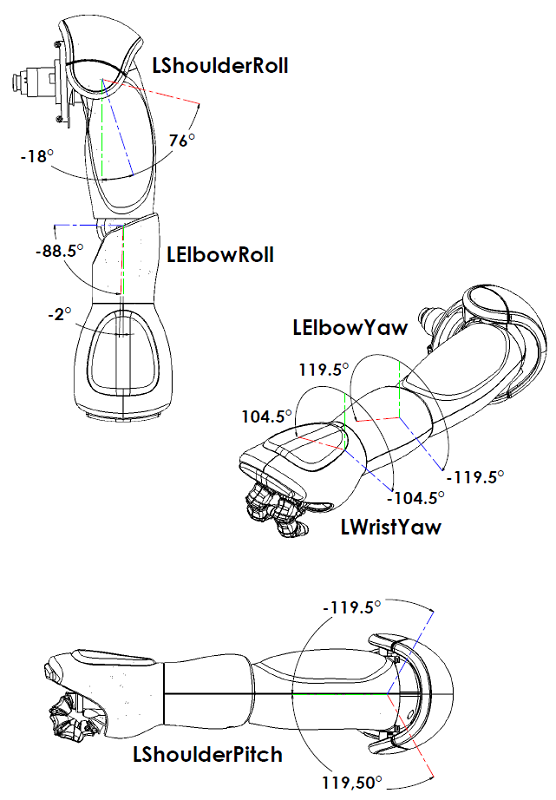
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| LShoulderPitch | Left shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LShoulderRoll | Left shoulder joint right and left (Z) | -18 to 76 | -0.3142 to 1.3265 |
| LElbowYaw | Left shoulder joint twist (X) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LElbowRoll | Left elbow joint (Z) | -88.5 to -2 | -1.5446 to -0.0349 |
| LWristYaw | Left wrist joint (X) | -104.5 to 104.5 | -1.8238 to 1.8238 |
| LHand | Left hand | Open and Close | Open and Close |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value
Device/SubDeviceList/LShoulderRoll/Position/Actuator/Value
Device/SubDeviceList/LElbowYaw/Position/Actuator/Value
Device/SubDeviceList/LWristYaw/Position/Actuator/Value
Device/SubDeviceList/LHand/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value
Device/SubDeviceList/LShoulderRoll/Position/Sensor/Value
Device/SubDeviceList/LElbowYaw/Position/Sensor/Value
Device/SubDeviceList/LWristYaw/Position/Sensor/Value
Device/SubDeviceList/LHand/Position/Sensor/Value
Right Arm joints¶
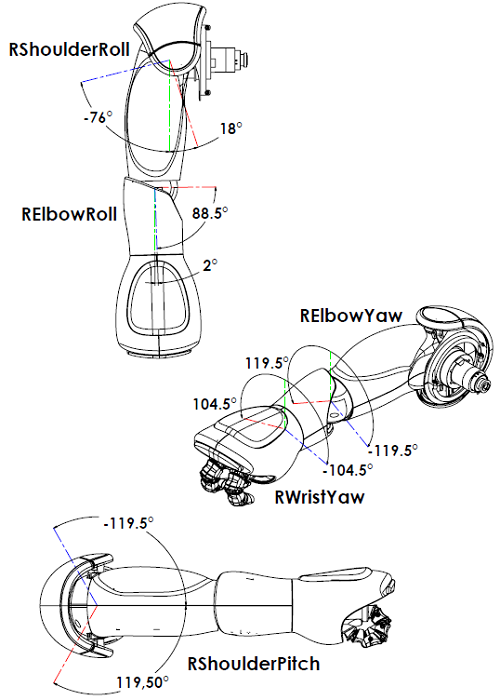
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| RShoulderPitch | Right shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RShoulderRoll | Right shoulder joint right and left (Z) | -76 to 18 | -1.3265 to 0.3142 |
| RElbowYaw | Right shoulder joint twist (X) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RElbowRoll | Right elbow joint (Z) | 2 to 88.5 | 0.0349 to 1.5446 |
| RWristYaw | Right wrist joint (X) | -104.5 to 104.5 | -1.8238 to 1.8238 |
| RHand | Right hand | Open and Close | Open and Close |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/RShoulderPitch/Position/Actuator/Value
Device/SubDeviceList/RShoulderRoll/Position/Actuator/Value
Device/SubDeviceList/RElbowYaw/Position/Actuator/Value
Device/SubDeviceList/RWristYaw/Position/Actuator/Value
Device/SubDeviceList/RHand/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/RShoulderPitch/Position/Sensor/Value
Device/SubDeviceList/RShoulderRoll/Position/Sensor/Value
Device/SubDeviceList/RElbowYaw/Position/Sensor/Value
Device/SubDeviceList/RWristYaw/Position/Sensor/Value
Device/SubDeviceList/RHand/Position/Sensor/Value