Robot version and Body Type¶
NAO Version¶
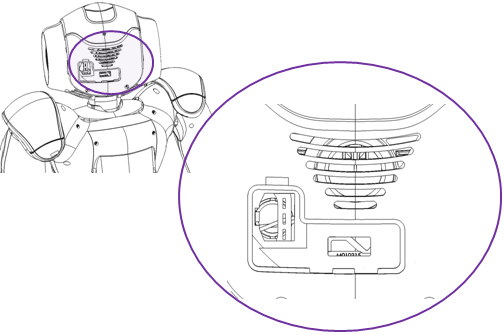
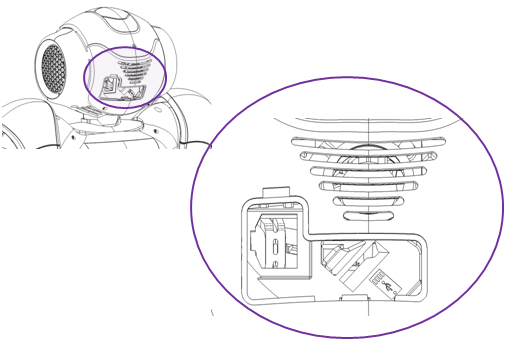
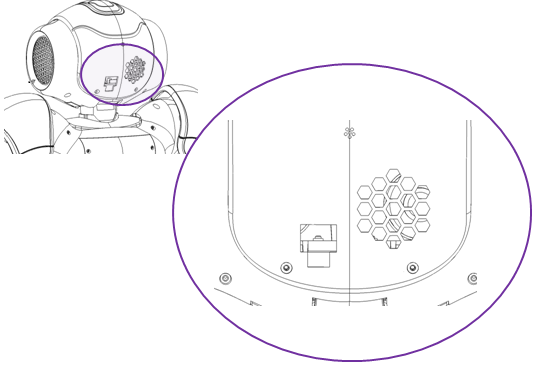
Many upgrade of NAO body type exist. They can be differentiated with the head’s back design.
NAO V4¶
NAO V3.3¶
NAO V3+, V3.2¶
Programmatic access to model information¶
You can call ALMotion API ALMotionProxy::getRobotConfig() to know you NAO’s body type and version.
# -*- encoding: UTF-8 -*-
import sys
from naoqi import ALProxy
def main(robotIP):
PORT = 9559
try:
motionProxy = ALProxy("ALMotion", robotIP, PORT)
except Exception,e:
print "Could not create proxy to ALMotion"
print "Error was: ",e
sys.exit(1)
# Example showing how to get the robot config
robotConfig = motionProxy.getRobotConfig()
for i in range(len(robotConfig[0])):
print robotConfig[0][i], ": ", robotConfig[1][i]
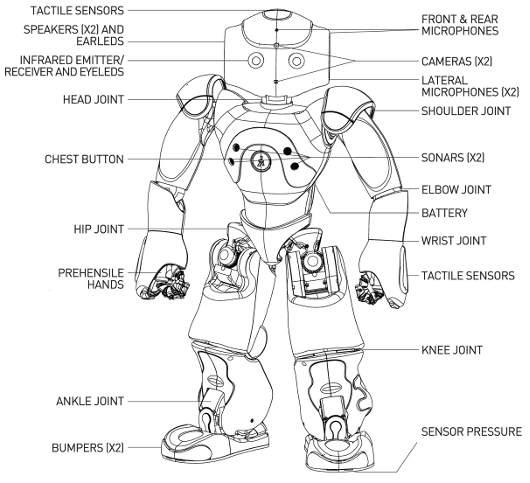
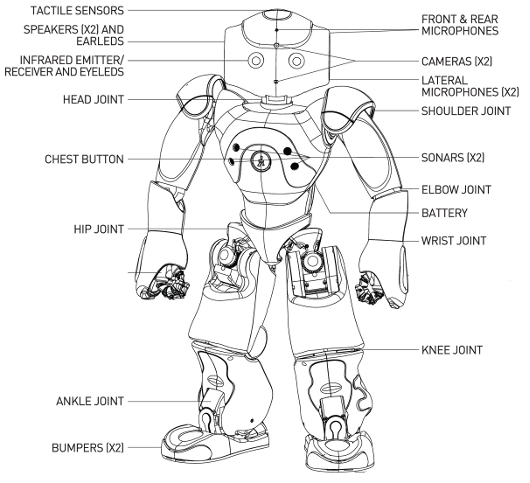
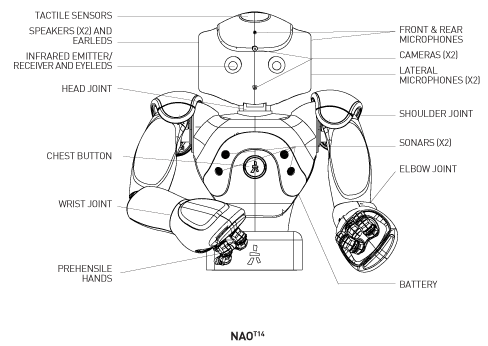
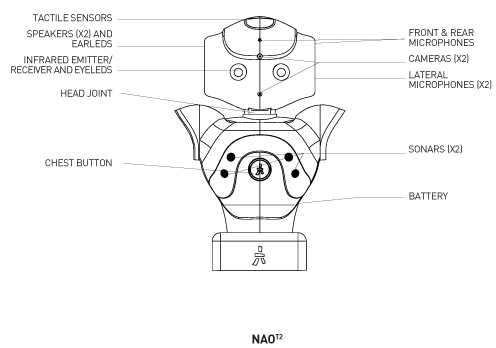
# "Model Type" : "naoH25", "naoH21", "naoT14" or "naoT2".
# "Head Version" : "VERSION_32" or "VERSION_33" or "VERSION_40".
# "Body Version" : "VERSION_32" or "VERSION_33" or "VERSION_40".
# "Laser" : True or False.
# "Legs" : True or False.
# "Arms" : True or False.
# "Extended Arms": True or False.
# "Hands" : True or False.
# "Arm Version" : "VERSION_32" or "VERSION_33" or "VERSION_40".
# Number of Legs : 0 or 2
# Number of Arms : 0 or 2
# Number of Hands: 0 or 2
if __name__ == "__main__":
robotIp = "127.0.0.1"
if len(sys.argv) <= 1:
print "Usage python almotion_getrobotconfig.py robotIP (optional default: 127.0.0.1)"
else:
robotIp = sys.argv[1]
main(robotIp)