Romeo - Links¶
See also
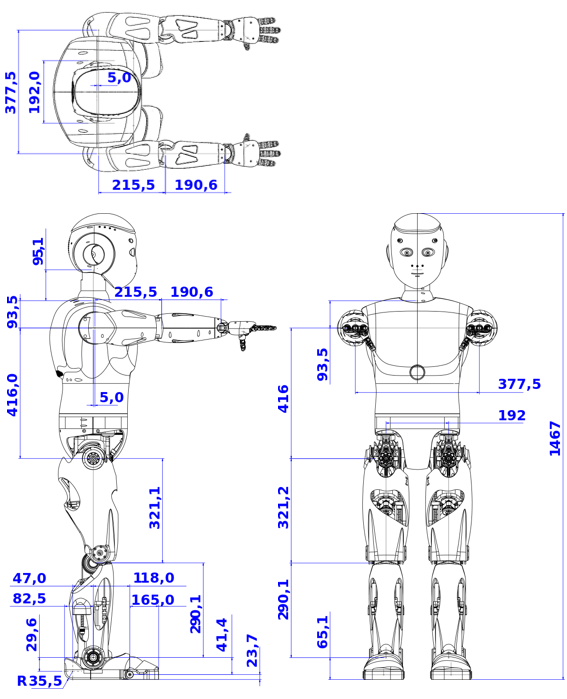
Dimensions overview¶
Link definition¶
Links are defined using:
- Joint names and,
- a point called Torso, located at the trunk of the robot.
Check Romeo - Masses to visualize them.
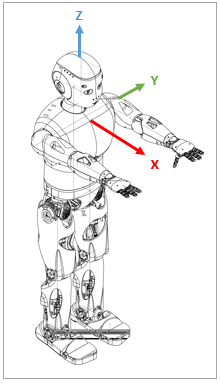
Axis definition
The X axis is positive toward robot’s front, the Y from right to left and the Z is vertical.
Head¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | NeckYaw | 0 | 0 | 93.5 |
| NeckYaw | NeckPitch | 0 | 0 | 0 |
| NeckPitch | HeadPitch | 0 | 0 | 95.11 |
| HeadPitch | HeadRoll | 0 | 0 | 0 |
Arms¶
Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | LShoulderPitch | 5 | 188.75 | 0 |
| LShoulderPitch | LShoulderYaw | 0 | 0 | 0 |
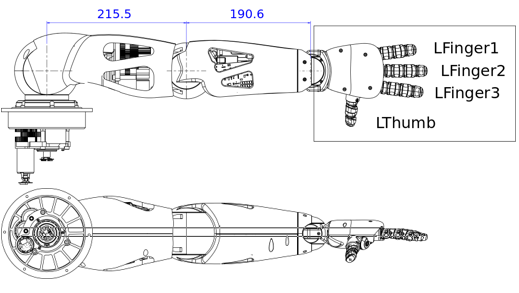
| LShoulderYaw | LElbowRoll | 215.5 | 0 | 0 |
| LElbowRoll | LElbowYaw | 0 | 0 | 0 |
| LElbowYaw | LWristRoll | 190.6 | 0 | 0 |
| LWristRoll | LWristYaw | 0 | 0 | 0 |
| LWristYaw | LWristPitch | 0 | 0 | 0 |
Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | RShoulderPitch | 5 | -188.75 | 0 |
| RShoulderPitch | RShoulderYaw | 0 | 0 | 0 |
| RShoulderYaw | RElbowRoll | 215.5 | 0 | 0 |
| RElbowRoll | RElbowYaw | 0 | 0 | 0 |
| RElbowYaw | RWristRoll | 190.6 | 0 | 0 |
| RWristRoll | RWristYaw | 0 | 0 | 0 |
| RWristYaw | RWristPitch | 0 | 0 | 0 |
Trunk¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| Torso | TrunkYaw | 0 | 0 | -71.7 |
Legs¶
Left
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | LHipYaw | 0 | 96 | -344.3 |
| LHipYaw | LHipRoll | 0 | 0 | 0 |
| LHipRoll | LHipPitch | 0 | 0 | 0 |
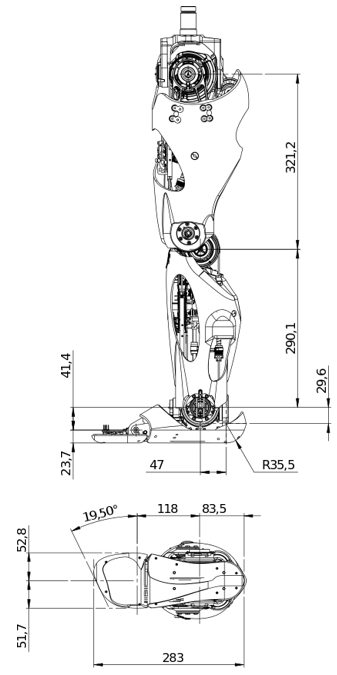
| LHipPitch | LKneePitch | 0 | 0 | -321.1 |
| LKneePitch | LAnklePitch | 0 | 0 | -290.1 |
| LAnklePitch | LAnkleRoll | 0 | 0 | 0 |
| LAnkleRoll | LToePitch | 118.0 | 0 | -41.4 |
Right
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
| TrunkYaw | RHipYaw | 0 | -96 | -344.3 |
| RHipYaw | RHipRoll | 0 | 0 | 0 |
| RHipRoll | RHipPitch | 0 | 0 | 0 |
| RHipPitch | RKneePitch | 0 | 0 | -321.1 |
| RKneePitch | RAnklePitch | 0 | 0 | -290.1 |
| RAnklePitch | RAnkleRoll | 0 | 0 | 0 |
| RAnkleRoll | RToePitch | 118.0 | 0 | -41.4 |
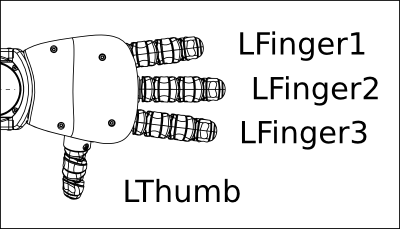
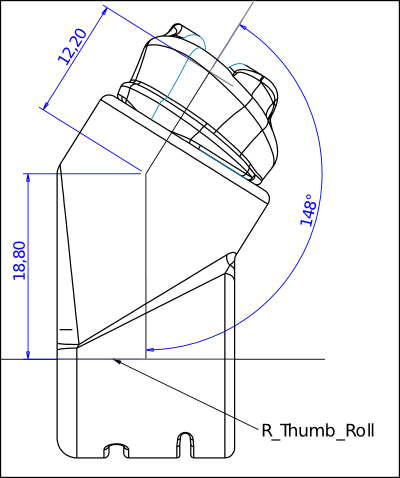
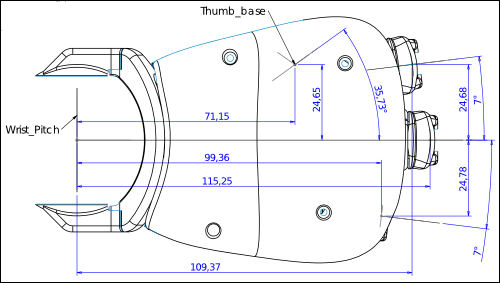
Hands¶
| From ... | To ... | X (mm) | Y (mm) | Z (mm) |
|---|---|---|---|---|
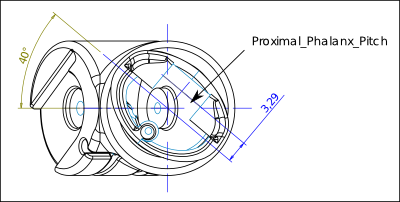
| LWristPitch | LFinger1 | 109.37 | 24.68 | 3.29 |
| LWristPitch | LFinger2 | 115.25 | 0.00 | 3.29 |
| LWristPitch | LFinger3 | 99.36 | -24.78 | 3.29 |
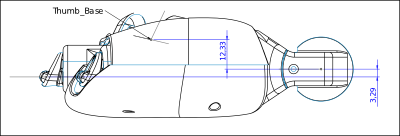
| LWristPitch | LThumb | 71.15 | 24.65 | -12.33 |