ROS Interface¶
What it does¶
The ROS interface provides a bridge between NAOqi and ROS. For further details about ROS, see: http://wiki.ros.org .
It runs on a desktop and is able to communicate with all the SoftBank Robotics robots.
How it works¶
ROS interface is a program running both as a ROS node and a NAOqi module.
It listens to NAOqi messages and publishes the translated ROS messages. Similarly, some services are interfaced between the two middle-ware to perform robotic actions.
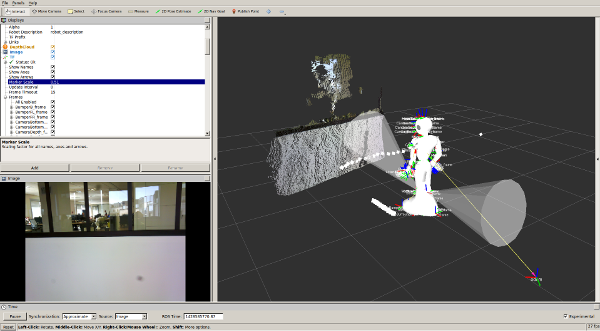
Once launched, to allow basic visualization and interaction with the robot, you can use the common ROS tools like:
- RViz http://wiki.ros.org/rviz , or
- rQt http://wiki.ros.org/rqt .
ROS interface uses the URDF and meshes provided by SoftBank Robotics to render data.
Requirements¶
ROS Indigo or higher.
How to use¶
ROS interface is released via ROS repositories.
Necessary information on how to install and use is provided by the community on SoftBank Robotics ROS wiki page: http://wiki.ros.org/Aldebaran .
Support¶
The code is pure open source: it is under the Apache 2.0 license with shared maintainership with the community.
If you need any support, contact the ROS community.