Connectivity¶
Ethernet¶
Main usage¶
Setting the WiFi connection.
Specification¶
1×RJ45 - 10/100/1000 base T.
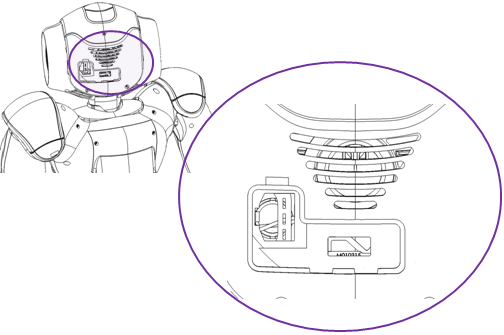
Location¶
- Ethernet port
- To access to the Ethernet port, remove the hatch behind the head of the robot.
WiFi¶
Main usage¶
Communication between Choregraphe and the robot.
Specification¶
| NAO V5 | IEEE 802.11 a/b/g/n |
| NAO V4 and V3.x | IEEE 802.11 b/g/n |
Security: 64/128 bit: WEP, WPA/WPA2.
USB¶
Main usage¶
Usually used to update the system of the robot, you can also use the USB port to connect external devices such as:
- Kinect or Asus 3D sensor, or
- Arduino device. See an example of implementation provided by our partner: http://www.humarobotics.com/en/robotics-lab/nao-and-arduino.html
Location¶
- USB port
- To access to the USB port, remove the hatch behind the head of the robot.
- Hatch behind the head of the robot