Masses
Warning
The Masses as well as the Center of Mass positions taken in account
in the robot models have been updated in order to remove the slight
dissymmetry between left and right limbs.
Legend
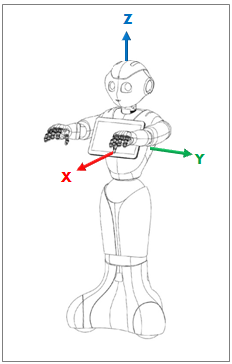
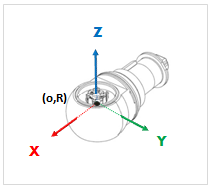
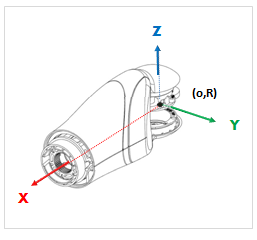
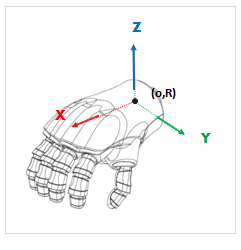
This page details, for each solid (S) of a robot, the Mass, Center of Mass
and Inertial matrix.
The Center of Mass position and the Inertial matrix are described relative
to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the
zero posture: standing with straight leg and arms pointing forwards.
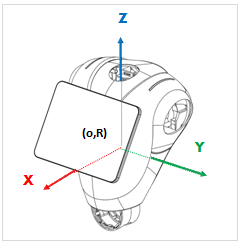
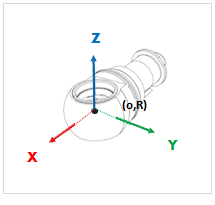
Torso
(o, R) is located on: Torso.
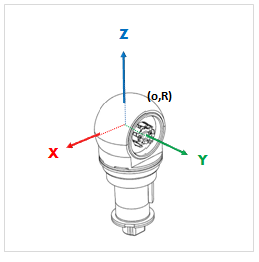
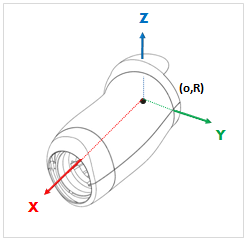
Neck
(o, R) is located on: HeadYaw.
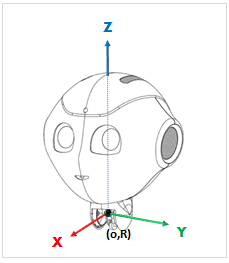
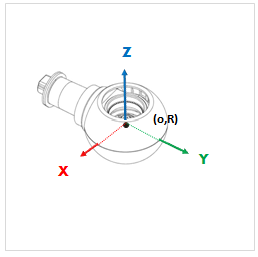
Head
(o, R) is located on: HeadPitch.
Left Shoulder
(o, R) is located on: LShoulderPitch.
Left Bicep
(o, R) is located on: LShoulderRoll.
Left Elbow
(o, R) is located on: LElbowYaw.
Left ForeArm
(o, R) is located on: LElbowRoll.
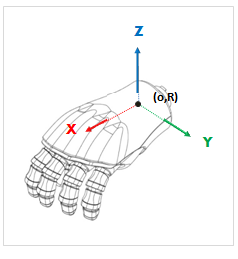
Left Hand with fingers
(o, R) is located on: LWristYaw.
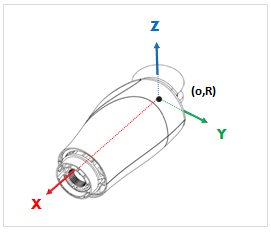
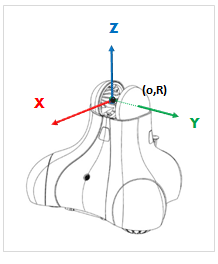
Hip
(o, R) is located on: HipRoll.
Thighs
(o, R) is located on: HipPitch.

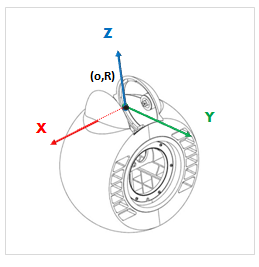
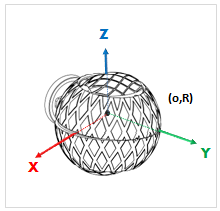
Base
(o, R) is located on: KneePitch.
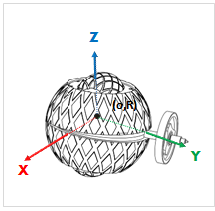
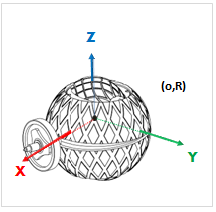
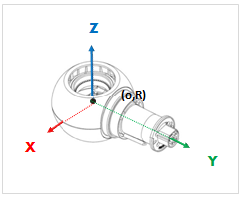
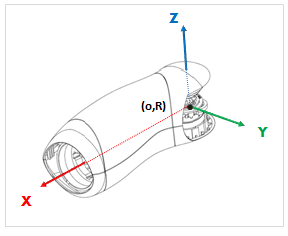
Wheel - Front Left
(o, R) is located on: WheelFL.
Wheel - Front Right
(o, R) is located on: WheelFR.
Wheel - Back
(o, R) is located on: WheelB.
Right Shoulder
(o, R) is located on: RShoulderPitch.
Right Bicep
(o, R) is located on: RShoulderRoll.
Right Elbow
(o, R) is located on: RElbowYaw.
Right ForeArm
(o, R) is located on: RElbowRoll.
Right Hand with fingers
(o, R) is located on: RWristYaw.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00322\\
0\\
-0.01029
\end{array}
\right]_{(o, R)}](../../_images/math/959d3fa3a490eebec4676636f884caf9613bbfd7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.0452761 & 0 & -0.00525567\\
0 & 0.0432702 & 0.000266886\\
-0.00525567 & 0.000266886 & 0.0258881\\
\end{array}
\right]_R](../../_images/math/9315d8a9d93d165bdb1fea6dc2141ffefd64cb49.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00207\\
0\\
-0.02636
\end{array}
\right]_{(o, R)}](../../_images/math/e6351e61650ceea99db035a643b8dbc2c96bfe35.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000343501 & 0 & 4.87482e-05\\
0 & 0.000493898 & -2.09863e-06\\
4.87482e-05 & -2.09863e-06 & 0.000215252\\
\end{array}
\right]_R](../../_images/math/c35d5e208759e928afd5c335dc1d3b7a36245a68.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00312\\
0\\
0.11152
\end{array}
\right]_{(o, R)}](../../_images/math/bd8da4ca0a93d1d97db1f12f9407229686a01660.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00597209 & 0 & 0.000931862\\
0 & 0.0059054 & -4.3428e-07\\
0.000931862 & -4.3428e-07 & 0.00570374\\
\end{array}
\right]_R](../../_images/math/3dc4bb1db83e0998e7db45d971f5508c4f7c9f15.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00018\\
-0.01856\\
0.00099
\end{array}
\right]_{(o, R)}](../../_images/math/b46e589fc25a39ef2c968d2b20bf71a019f90a8b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000361198 & -1.0453e-07 & -5.24532e-07\\
-1.0453e-07 & 0.000137229 & -5.79522e-06\\
-5.24532e-07 & -5.79522e-06 & 0.000399194\\
\end{array}
\right]_R](../../_images/math/5eb19b40e734f9389bb520e314a165dcf67216ab.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.08151\\
0.01284\\
-0.01017
\end{array}
\right]_{(o, R)}](../../_images/math/732eb532bff741ed9445aeb483023944ea199191.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000500872 & 0.00109321 & -0.00092282\\
0.00109321 & 0.00126284 & -0.000141027\\
-0.00092282 & -0.000141027 & 0.00115718\\
\end{array}
\right]_R](../../_images/math/51e4df2e482be1484d18ab4b9d2645879c953c00.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02297\\
-0.00019\\
0.00119
\end{array}
\right]_{(o, R)}](../../_images/math/b4b5956b614e8dc05a6c03a8afe4553c539cf72a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000122971 & 1.4139e-06 & 1.05526e-05\\
1.4139e-06 & 0.000331766 & 1.86491e-06\\
1.05526e-05 & 1.86491e-06 & 0.000303047\\
\end{array}
\right]_R](../../_images/math/02d14e70963858c76eb4ea7d8be8aac9dedb520c.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.0593\\
0.00271\\
-0.01014
\end{array}
\right]_{(o, R)}](../../_images/math/d0833c71b2a890501d6e229782909b1816e41af4.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00156513 & 3.85342e-05 & -0.000138805\\
3.85342e-05 & 0.00173219 & -8.93543e-06\\
-0.000138805 & -8.93543e-06 & 0.000273081\\
\end{array}
\right]_R](../../_images/math/79eae8d3f240b576e83beac0bdbe1203773aecfd.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.03536\\
-0.00072\\
-0.00207
\end{array}
\right]_{(o, R)}](../../_images/math/65f40fc6c894f64a7161745cf374bcc6536ead85.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000151643 & -2.46935e-05 & -4.3233e-05\\
-2.46935e-05 & 0.000431099 & 3.95851e-06\\
-4.3233e-05 & 3.95851e-06 & 0.000456172\\
\end{array}
\right]_R](../../_images/math/72b9fe311a064212723f68107bcbc1f321d68672.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00032\\
0\\
-0.06039
\end{array}
\right]_{(o, R)}](../../_images/math/a22b2a99e191c62a5a8d92a22a0720aef082599c.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00502422 & 0 & -1.40621e-05\\
0 & 0.00640971 & -0.000159449\\
-1.40621e-05 & -0.000159449 & 0.00441082\\
\end{array}
\right]_R](../../_images/math/e647be7539dff89cec7b54b4e38175ca549781db.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00237\\
0\\
-0.09654
\end{array}
\right]_{(o, R)}](../../_images/math/35fc36844e57118d8eb79c95d61896c83b443b14.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.034351 & 0 & -0.00134835\\
0 & 0.0303122 & 8.37542e-05\\
-0.00134835 & 8.37542e-05 & 0.0143771\\
\end{array}
\right]_R](../../_images/math/674f5b980e6646223892f7ff2662d5ea5829eee0.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.00220451\\
0\\
-0.185729
\end{array}
\right]_{(o, R)}](../../_images/math/4e4fd66b32c30822608a0fe8a7b3fa2406ccc053.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.129229 & 0.000401632 & -0.0168449\\
0.000401632 & 0.122839 & -1.01666e-08\\
-0.0168449 & -1.01666e-08 & 0.108168\\
\end{array}
\right]_R](../../_images/math/747b86e493be853a41cdc49b10b1768de6387bd7.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0\\
0\\
0
\end{array}
\right]_{(o, R)}](../../_images/math/789eb6afb27492e3f43ae9265dd974808474d812.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00299756 & -6.3068e-07 & -5.56903e-06\\
-6.3068e-07 & 0.00303229 & 9.0408e-07\\
-5.56903e-06 & 9.0408e-07 & 0.00296585\\
\end{array}
\right]_R](../../_images/math/e462e570081761cbc99021a636d831e61c4407b3.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.00018\\
0.01856\\
0.00099
\end{array}
\right]_{(o, R)}](../../_images/math/ce73329366218632e1551cbf97e1f719b611abee.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000361198 & 1.0453e-07 & -5.24532e-07\\
1.0453e-07 & 0.000137229 & 5.79522e-06\\
-5.24532e-07 & 5.79522e-06 & 0.000399194\\
\end{array}
\right]_R](../../_images/math/3e96e6d1824bea5ce0441da63adfc2788b6539e6.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.08151\\
-0.01284\\
-0.01017
\end{array}
\right]_{(o, R)}](../../_images/math/b805d398de8030fa37cceecdf59d19277429c327.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000500872 & -0.00109321 & -0.00092282\\
-0.00109321 & 0.00126284 & 0.000141027\\
-0.00050397327868 & 0.000141027 & 0.00115718\\
\end{array}
\right]_R](../../_images/math/ff6c79a255a4f90f44e15dadc15247489840fd89.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02297\\
0.00019\\
0.00119
\end{array}
\right]_{(o, R)}](../../_images/math/272d9c967b94f9d04fe6d81f3cc653f13be04b25.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000122971 & -1.4139e-06 & 1.05526e-05\\
-1.4139e-06 & 0.000331766 & -1.86491e-06\\
1.05526e-05 & -1.86491e-06 & 0.000303047\\
\end{array}
\right]_R](../../_images/math/f3374c0842cb7ca881ba35704bc30b8c249118a5.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.0593\\
-0.00271\\
-0.01014
\end{array}
\right]_{(o, R)}](../../_images/math/4f8a20151a317e15a0afe75712fe33ad36052908.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00156513 & -3.85342e-05 & -0.000138805\\
-3.85342e-05 & 0.00173219 & 8.93543e-06\\
-0.000138805 & 8.93543e-06 & 0.000273081\\
\end{array}
\right]_R](../../_images/math/18ced149b094a4aedd112ecb45c22edb48c5d6b5.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
0.03536\\
0.00072\\
-0.00207
\end{array}
\right]_{(o, R)}](../../_images/math/8d948a7ebf5abb33d960b0b52665806d0548116a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.000151643 & 2.46935e-05 & -4.3233e-05\\
2.46935e-05 & 0.000431099 & -3.95851e-06\\
-4.3233e-05 & -3.95851e-06 & 0.000456172\\
\end{array}
\right]_R](../../_images/math/4e71f853db084575bb153687879fa62b0afc6539.png)
