Legend
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.
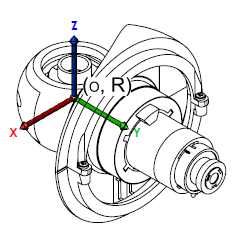
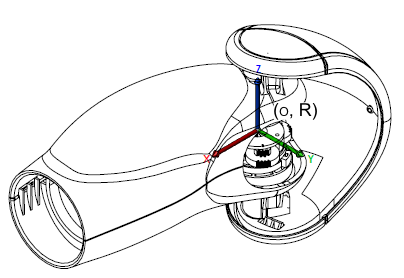
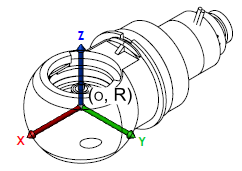
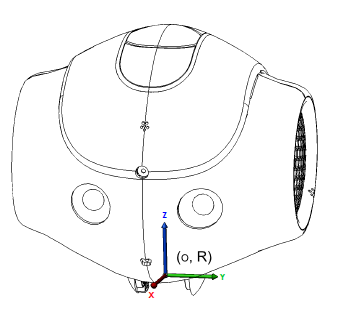
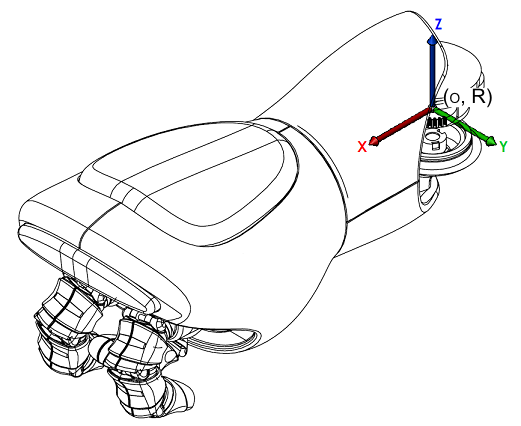
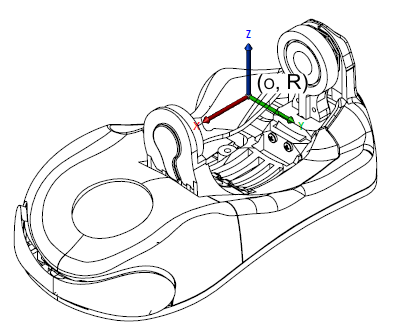
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
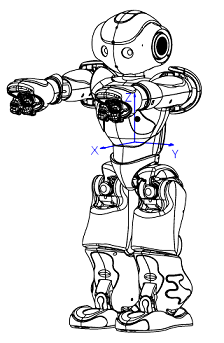
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards.
Arms
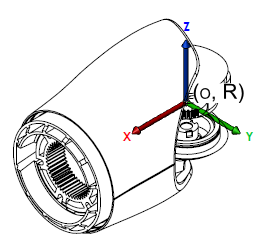
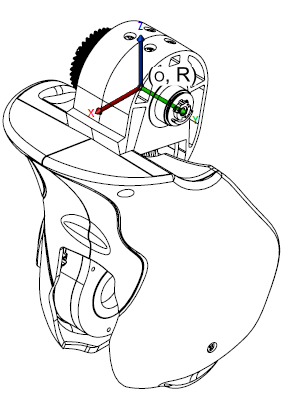
Right Shoulder
(o, R) is located on the joint: RShoulderPitch.
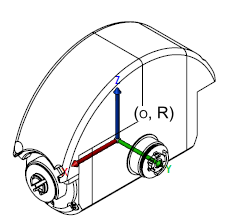
Left Shoulder
(o, R) is located on the joint: LShoulderPitch.
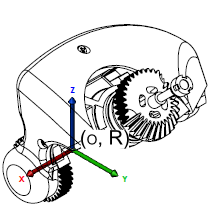
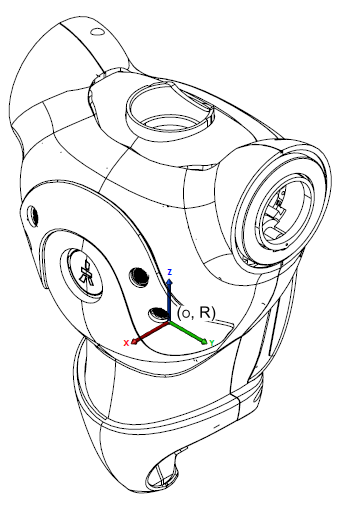
Right Bicep
(o, R) is located on the joint: RShoulderRoll.
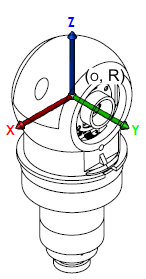
Left Bicep
(o, R) is located on the joint: LShoulderRoll.
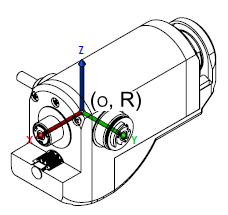
Right Elbow
(o, R) is located on the joint: RElbowYaw.
Left Elbow
(o, R) is located on the joint: LElbowYaw.
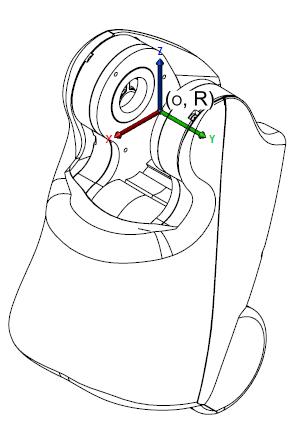
Right Motorized ForeArm
(o, R) is located on the joint: RElbowRoll.
Left Motorized ForeArm
(o, R) is located on the joint: LElbowRoll.
Legs
Right Pelvis
(o, R) is located on the joint: RHipYawPitch.
Left Pelvis
(o, R) is located on the joint: LHipYawPitch.
Right Hip
(o, R) is located on the joint: RHipRoll.
Left Hip
(o, R) is located on the joint: LHipRoll.
Right Thigh
(o, R) is located on the joint: RHipPitch.
Left Thigh
(o, R) is located on the joint: LHipPitch.
Right Tibia
(o, R) is located on the joint: RKneePitch.
Left Tibia
(o, R) is located on the joint: LKneePitch.
Right Ankle
(o, R) is located on the joint: RAnklePitch.
Left Ankle
(o, R) is located on the joint: LAnklePitch.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00415 \\
+0.00000 \\
+0.04258
\end{array}
\right]_{(o, R)}](../../_images/math/9ff61b0280fcc01282cb7805abcf282d32be9697.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00496741976 & +0.00001247398 & +0.00016446814 \\
+0.00001247398 & +0.00479135246 & -0.00002477669 \\
+0.00016446814 & -0.00002477669 & +0.00159784829
\end{array}
\right]_R](../../_images/math/350a15447044a99e8deb05baf0b44e2e39febd92.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00002 \\
+0.00000 \\
-0.02556
\end{array}
\right]_{(o, R)}](../../_images/math/2aba52ff7eef51a2b81080cce51acab60db4472d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006180308 & -0.00000000205 & -0.00000004948 \\
-0.00000000205 & +0.00006281859 & -0.00000005067 \\
-0.00000004948 & -0.00000005067 & +0.00000543977
\end{array}
\right]_R](../../_images/math/308678c2a3c144f1a4db65ea606aec8d6a47e754.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00120 \\
-0.00000 \\
+0.05353
\end{array}
\right]_{(o, R)}](../../_images/math/02c1beae872d1aa68203c221344e15db1d7139f8.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00226587004 & +0.00000787181 & -0.00001192653 \\
+0.00000787181 & +0.00226420513 & -0.00000231846 \\
-0.00001192653 & -0.00000231846 & +0.00087373321
\end{array}
\right]_R](../../_images/math/0a779c65af5d63dc04cdf51912be83045dfbf2d4.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
+0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/3126b3a5256fc52e06650faaad20b67d663b2788.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & +0.00000202467 & +0.00000001722 \\
+0.00000202467 & +0.00001405799 & -0.00000000841 \\
+0.00000001722 & -0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/f37a68bdf5366b3e4c81e7448504ee8f06ec0464.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
-0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/43de778a29087b9d1cc5e37b6f4968281e17594a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & -0.00000202467 & +0.00000001722 \\
-0.00000202467 & +0.00001405799 & +0.00000000841 \\
+0.00000001722 & +0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/8cbb1f7ecf145ba9c24265db0a1f12f472f0d02e.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
-0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/29536498404f9d607f238b35d6f0a6e758b01f25.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & +0.00003978057 & -0.00000752601 \\
+0.00003978057 & +0.00029001445 & +0.00000152945 \\
-0.00000752601 & +0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/563e6efab68c939f1f9740c8c61cc0f73375fb87.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
+0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/df1d17394ef1a8bdd4b111f7ac8563305bf58c97.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & -0.00003978057 & -0.00000752601 \\
-0.00003978057 & +0.00029001445 & -0.00000152945 \\
-0.00000752601 & -0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/e9b660e60217518e413746f5f1d02e1b9cf9fb31.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
+0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/16b901284fe0c4e500187d7dcc9780fa956d01b5.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & +0.00000002243 & +0.00000001534 \\
+0.00000002243 & +0.00006225405 & -0.00000000559 \\
+0.00000001534 & -0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/4d32f81a337192657f7c1be5d788c1e5fb447b3a.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
-0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/888f3cc5ab8900c919e630f809ca03606e5c6d17.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & -0.00000002243 & +0.00000001534 \\
-0.00000002243 & +0.00006225405 & +0.00000000559 \\
+0.00000001534 & +0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/a7e733bfdc5d8093cde66cf37892329fa925afe6.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
-0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/e9eda1c446b79758b1838c3f72d24116f2661293.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & +0.00000216293 & -0.00000071846 \\
+0.00000216293 & +0.00008890315 & +0.00000010809 \\
-0.00000071846 & +0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/49a080e959941ae578db806558eb7622b0e48cf4.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
+0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/baf5fd954b2bf67d782dcbf0dddaef3552fb102a.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & -0.00000216293 & -0.00000071846 \\
-0.00000216293 & +0.00008890315 & -0.00000010809 \\
-0.00000071846 & -0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/93e5aa17602ad76283d8b82d89d704c56466c5cc.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.06536 \\
-0.00034 \\
-0.00002
\end{array}
\right]_{(o, R)}](../../_images/math/3d88fe0650c75e74282c540ede0721b3e48966cd.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007831052 & -0.00001006758 & +0.00000756942 \\
-0.00001006758 & +0.00112996801 & +0.00000013237 \\
+0.00000756942 & +0.00000013237 & +0.00112695518
\end{array}
\right]_R](../../_images/math/f94b4815624e86d8dc07ee8d7acc56031c7461ad.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.06536 \\
+0.00034 \\
-0.00002
\end{array}
\right]_{(o, R)}](../../_images/math/388603670ff490f756efc69628d0ce93eca0d2de.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007831052 & +0.00001006758 & +0.00000756942 \\
+0.00001006758 & +0.00112996801 & -0.00000013237 \\
+0.00000756942 & -0.00000013237 & +0.00112695518
\end{array}
\right]_R](../../_images/math/91aab19e551cf7cd27d5b09c50da3a99c6aff206.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00766 \\
+0.01200 \\
+0.02717
\end{array}
\right]_{(o, R)}](../../_images/math/8cdcd6b7ce2c1784692ba1e0824e896e908874f0.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008997164 & +0.00000500214 & +0.00001273548 \\
+0.00000500214 & +0.00010552250 & -0.00002770075 \\
+0.00001273548 & -0.00002770075 & +0.00006688382
\end{array}
\right]_R](../../_images/math/8a5b8d1da9f441a2f79203e3ec3190a56e6f210e.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00766 \\
-0.01200 \\
+0.02717
\end{array}
\right]_{(o, R)}](../../_images/math/e480f85a0983ab4a0eac4965461c929ec306dea7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008997164 & -0.00000500214 & +0.00001273548 \\
-0.00000500214 & +0.00010552250 & +0.00002770075 \\
+0.00001273548 & +0.00002770075 & +0.00006688382
\end{array}
\right]_R](../../_images/math/16a8ba1fde6ee99e621158487504aef9bcf28d39.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01649 \\
-0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/5082945124482d310f5d4f244898339c5b493f94.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002791129 & -0.00000004765 & -0.00000530958 \\
-0.00000004765 & +0.00010146847 & -0.00000000007 \\
-0.00000530958 & -0.00000000007 & +0.00009209165
\end{array}
\right]_R](../../_images/math/ff55b73f82c653b431e47aadc81c8f07aa45959d.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01649 \\
+0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/70160371d3a1c86ac5355fd047ec43f576e38bfc.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002791129 & +0.00000004765 & -0.00000530958 \\
+0.00000004765 & +0.00010146847 & +0.00000000007 \\
-0.00000530958 & +0.00000000007 & +0.00009209165
\end{array}
\right]_R](../../_images/math/8480df392ea9649f83e80f1d5443ad3d96caa31c.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00132 \\
-0.00235 \\
-0.05352
\end{array}
\right]_{(o, R)}](../../_images/math/78423fe64d8dbf6172694c8911cee4f00c64b7ce.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00163011959 & -0.00000031939 & +0.00008287048 \\
-0.00000031939 & +0.00159269948 & -0.00004333919 \\
+0.00008287048 & -0.00004333919 & +0.00030120888
\end{array}
\right]_R](../../_images/math/490ee15560e535a862b2d48303e92f552cf5bc81.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00132 \\
+0.00235 \\
-0.05352
\end{array}
\right]_{(o, R)}](../../_images/math/c18df70afb764b8aca56056b55986fb6e871def3.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00163011959 & +0.00000031939 & +0.00008287048 \\
+0.00000031939 & +0.00159269948 & +0.00004333919 \\
+0.00008287048 & +0.00004333919 & +0.00030120888
\end{array}
\right]_R](../../_images/math/6d4c0a056494b2e93cd100e50c7449a533386801.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00422 \\
-0.00252 \\
-0.04868
\end{array}
\right]_{(o, R)}](../../_images/math/f4ed207cda8b887958c060ff81f70c1eec083b7d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00115382550 & -0.00000077529 & +0.00003231279 \\
-0.00000077529 & +0.00110377729 & -0.00004396728 \\
+0.00003231279 & -0.00004396728 & +0.00018861038
\end{array}
\right]_R](../../_images/math/411ff0d6e7aea25f0a28e053a17d78403101e637.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00422 \\
+0.00252 \\
-0.04868
\end{array}
\right]_{(o, R)}](../../_images/math/b316f383deed528e1add3fadd512dcf665a2b1cf.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00115382550 & +0.00000077529 & +0.00003231279 \\
+0.00000077529 & +0.00110377729 & +0.00004396728 \\
+0.00003231279 & +0.00004396728 & +0.00018861038
\end{array}
\right]_R](../../_images/math/8e9f755c64ded19988d15c63049c9b37d4eaa0c8.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00142 \\
-0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/ecd63687b0acb39bf56d111525f07de9966f8f34.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00003882614 & +0.00000004711 & +0.00000221327 \\
+0.00000004711 & +0.00007211571 & -0.00000000686 \\
+0.00000221327 & -0.00000000686 & +0.00005352041
\end{array}
\right]_R](../../_images/math/324c3d113071ba543609094bece28439c158cb25.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00142 \\
+0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/2cacd7169d39ff1b5f5fb74afe673d6b49bd5007.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00003882614 & -0.00000004711 & +0.00000221327 \\
-0.00000004711 & +0.00007211571 & +0.00000000686 \\
+0.00000221327 & +0.00000000686 & +0.00005352041
\end{array}
\right]_R](../../_images/math/ae3c908a9a2ef6126e4f63cb2bd794a6d3d07092.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02540 \\
-0.00332 \\
-0.03241
\end{array}
\right]_{(o, R)}](../../_images/math/07b29355221c2f9c91e1500d3a5a8eb4e6c25189.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00026961204 & +0.00000587690 & +0.00013924446 \\
+0.00000587690 & +0.00064387818 & -0.00001887096 \\
+0.00013924446 & -0.00001887096 & +0.00052519167
\end{array}
\right]_R](../../_images/math/4ff6fe076e88ca21c41a180514a82b7470c8dc66.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02540 \\
+0.00332 \\
-0.03241
\end{array}
\right]_{(o, R)}](../../_images/math/07bbf1e989496be657afd839b04fa3374a17ff37.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00026961204 & -0.00000587690 & +0.00013924446 \\
-0.00000587690 & +0.00064387818 & +0.00001887096 \\
+0.00013924446 & +0.00001887096 & +0.00052519167
\end{array}
\right]_R](../../_images/math/9e0f111a5266da8de3262854c1b70a3488307221.png)
