What is NAOqi Framework
NAOqi is the name of the main software that runs on the robot and controls it.
The NAOqi Framework is the programming framework used to program Aldebaran robots.
It answers to common robotics needs including: parallelism, resources, synchronization, events.
Main characteristics
This framework allows homogeneous communication between different modules (motion,
audio, video), homogeneous programming and homogeneous information sharing.
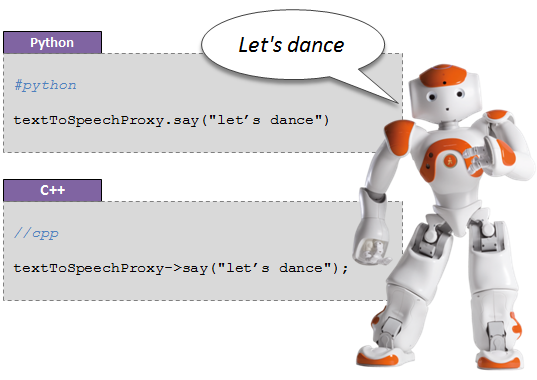
NAOqi framework is Cross platform and Cross language that
allows you to create Distributed applications.
Distributed applications
A real time application can be, not only one executable, but also several
processes and/or modules distributed on several robots.
Whatever your choice is, the call methods are always the same.
Connect an executable to another robot using its IP address and port,
and all the API methods from other executables are available in exactly
the same way as with a local method.
Note that NAOqi makes automatically the choice between fast direct calls
(LPC) and remote calls (RPC).
How it works
Introspection
Introspection is the foundation of robot API, capabilities, monitoring and action
on monitored functions. The robot knows all the available API functions.
Unloading a library will automatically remove the corresponding API functions.
A function defined in a module can be added in the API with a BIND_METHOD
(defined in almodule.h).
If you bind a function - just three source code lines - you automatically
benefit from the following features:
- Call function in both C++ and Python (see Cross language),
- Know if the function is being executed,
- Execute function locally or remotely (from a computer or another robot)
(see Distributed applications),
- Call wait, stop, isRunning on functions.
The NAOqi process
The NAOqi executable which runs on the robot is a broker. When it starts,
it loads a preferences file called autoload.ini that defines which
libraries it should load. Each library contains one or more modules that use
the broker to advertise their methods.
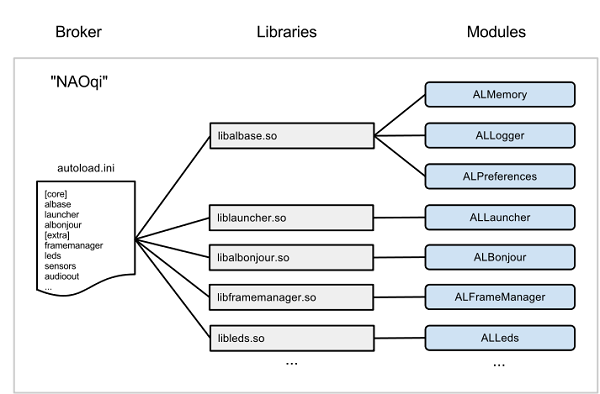
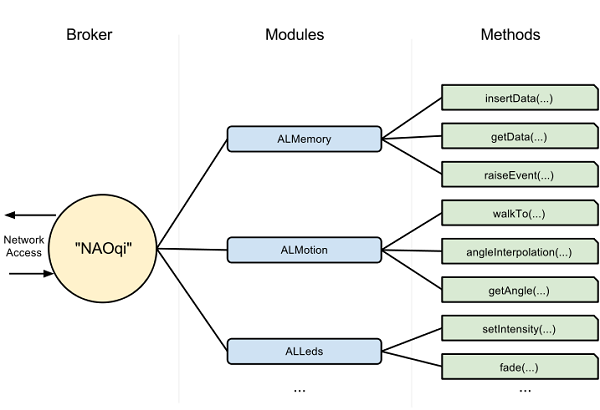
The broker provides lookup services so that any module in the tree or across
the network can find any method that has been advertised.
Loading modules forms a tree of methods attached to modules, and modules
attached to a broker.
Broker
A broker is an object that provides:
- Directory services: allowing you to find modules and methods.
- Network access: allowing the methods of attached modules to be
called from outside the process.
Most of the time, you don’t need to think about brokers. They do their work
transparently, allowing you to write code that will be the same for calls to
“local modules” (in the same process) or “remote modules” (in another
process or on another machine).
Proxy
A proxy is an object that will behave as the module it represents.
For instance, if you create a proxy to the ALMotion module, you will get
an object containing all the ALMotion methods.
To create a proxy to a module, (and thus calling the methods of a module)
you have two choices:
- Simply use the name of the module. In this case, the code you are running and
the module to which you want to connect to must be in the same broker.
This is called a local call.
- Use the name of the module, and the IP and port of a broker. In this case, the
module must be in the corresponding broker.
The full difference between local and remote modules is explained in the
Local modules section.
To learn how to extend the NAO API, you must learn how to create new modules.
You can read a tutorial about creating a C++ NAOqi module in the
Extending NAO API - Creating a new module section.
Modules
Typically each Module is a class within a library. When the library is loaded
from the autoload.ini, it will automatically instantiate the module class.
In the constructor of a class that derives from ALModule, you can
“bind” methods. This advertises their names and method signatures to the
broker so that they become available to others.
A module can be either remote or local.
- If it is remote, it is compiled as an executable file, and can be run
outside the robot. Remote modules are easier to use and can be debugged easily
from the outside, but are less efficient in terms of speed and memory usage.
- If it is local, it is compiled as a library, and can only be used on the
robot. However, they are more efficient than a remote module.
Each module contains various methods. Among them, some methods are bound, which
means they can be called from outside the module, for example inside another
module, from an executable etc. The way to call these bound functions does not
vary if the module is remote or local: the module automatically adapts.
The module API can be seen from the robot web page.
Local modules
Local modules are two (or more) modules launched in the same process. They speak
to each other using only ONE broker.
Since local modules are in the same process, they can share variables and call
each others’ methods without serialization nor networking. This allow the
fastest possible communication between them.
If you need to do some close loop (enslavement for example), you MUST use local modules.
Remote modules
Remote modules are modules which communicate using the network. A remote module
needs a broker to speak to other modules. The broker is responsible for all the
networking part. You must know that remote modules work using SOAP over the network.
You cannot do fast access using remote module (direct memory access for example).
Connection between remote modules
Remote modules can speak with other modules by connecting their brokers to other modules’
brokers using a proxy.
- A connection Broker to Broker opens a mutual communication. Modules from
both brokers can talk to each others.
- A Proxy to Broker connection opens a single way of communication.
The proxy can access to all modules registered to the broker BUT the modules
registered to the broker cannot access to the module that owns the proxy.
Broker to Broker connection
You can connect two modules together by connecting their brokers.
For example, you have two modules B and C. When you connect their brokers, B
can access to C’s functions and C can access to B’s functions.
To connect modules this way you need to specify the IP address and port number
of the main broker. (--pip, --pport command line option when you start your module).
Then you can access the module by getting a proxy on it:
AL::ALProxy proxy = AL::ALProxy(<modulename>);
Since module’s broker is already connected using --pip and --pport,
you do not need to specify IP address and port number when you create a proxy.
Proxy to Broker connection
You can connect your module to another one without specifying
--pip and --pport. To do that, you need to create a proxy inside your module
and connect it to the broker IP address and port number you want.
For example, you have two modules B and C. When you connect B to C just using a proxy, B can access to C functions BUT C cannot access to B functions.
// A broker needs a name, an IP and a port to listen:
const std::string brokerName = "mybroker";
// NAOqi ip
const std::string pip = "127.0.0.1"; // local NAOqi
// NAOqi port
int pport = 9559;
// Create your own broker
boost::shared_ptr<AL::ALBroker> broker =
AL::ALBroker::createBroker(brokerName, "0.0.0.0", 54000, pip, pport);
AL::ALProxy proxy = AL::ALProxy(broker, <modulename>);
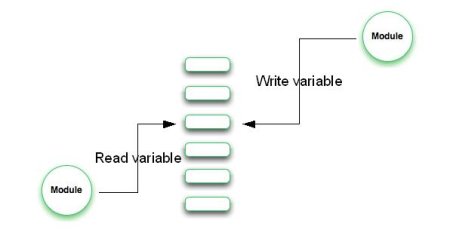
Memory
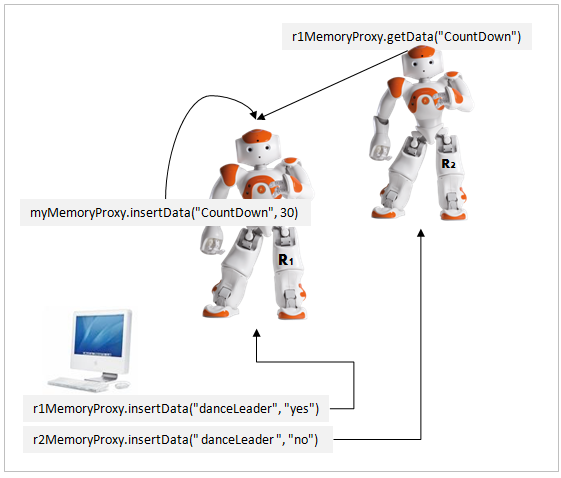
ALMemory is the robot memory. All modules can read or write data, subscribe on
events so as to be called when events are raised.
Please be aware that ALMemory is not a real-time synchronization tool. Limit
subscribe on DCM/time or motion/synchro or real time variable.
ALMemory
ALMemory is an array of ALValues (for further details, see: ALValue library).
Variable access is thread safe. We use read/write critical sections to avoid bad
performances when the memory is read.
ALMemory contains three types of data:
- Data from Actuators and Sensors,
- Event and
- Micro-event.
For further details, see: ALMemory.
Reacting to events
A few modules exposes also some events.
You must subscribe to event from an other module, using a callback that must
be a method of your subscriber.
For instance, you can have a module called FaceReaction containing a method
onFaceDetected.
You can subscribe the FaceReaction module to the FaceDetected
method of the ALFaceRecognition module with the onFaceDetected callback.
This will cause the face detection algorithm to run, and every time a face
is detected, the onFaceDetected callback will be called.
To see how this is done in Python, please see the
Making a Python module - Reacting to events section.