Motion widget¶
What is the Motion widget¶
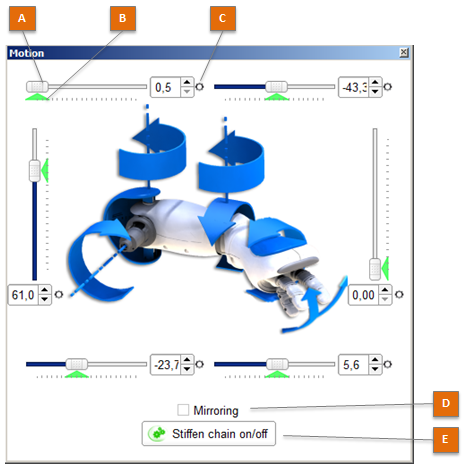
The Motion widget enables you to modify the joint values of each limb.
To display the Motion widget, in the Robot view, click any moving part of the robot (head or limbs).
The table below describes in details the control buttons and indicators of the Motion widget:
| Part | Name | Description |
|---|---|---|
| A | Slider | Allows you to adjust the joint value. You can move it, as well as enter a value in the associated text box. The robot tries to reach the command value with its joint as soon as possible. For further details, see: |
| B | Current joint value | The color indicates if the requested value has been reached.
|
| C | Record button | Saves the defined value, when a Timeline box is currently opened. This button can be:
For further details, see: Storing joint value using the Motion widget. |
| D | Mirroring option | If selected, actions (send a command value, register a joint value, etc) are also executed on the symmetric limb. For example left and right arms will move the same way. |
| E | Stiffen chain on/off button | Sets on/off the Stiffness of the whole selected chain of joints (Head, Arm or Leg). This button can be:  (green): Stiffness off, you can move this part manually on the real robot, but commands have no effect. (green): Stiffness off, you can move this part manually on the real robot, but commands have no effect. (orange): intermediate state depending on the Stiffness value. (orange): intermediate state depending on the Stiffness value. (red): Stiffness on, the robot is able to move this part when requested, but you cannot move it manually. (red): Stiffness on, the robot is able to move this part when requested, but you cannot move it manually. |
 (grey): you cannot store joint values because you are not currently editing a
(grey): you cannot store joint values because you are not currently editing a
 (black): the current joint value is not stored at the current selected frame.
(black): the current joint value is not stored at the current selected frame. (black and red): the current joint value is being stored at the current selected frame.
(black and red): the current joint value is being stored at the current selected frame.Moving joints using the Motion widget¶
Simulated robot¶
To move joints of a simulated robot, using the Motion widget:
| Step | Action |
|---|---|
In the Robot view, click any moving part of the robot (head or limbs). The Motion widget appears. |
|
Use one of the Sliders to adjust the joint value. The simulated robot moves. |
Real robot¶
To use the Motion widget to make a real robot move:
| Step | Action |
|---|---|
| Make sure Choregraphe is connected to a real robot. | |
In the Robot view, click any moving part of the robot (head or limbs). The Motion widget appears. |
|
Make sure the Stiffness is on. If not, click the Stiffen chain on/of button. |
|
Use one of the Sliders to adjust the joint value. Simulated and real robots move together. |
Moving the real robot to update the Motion widget¶
To edit the Motion widget using the real robot:
| Step | Action |
|---|---|
| Make sure Choregraphe is connected to a real robot. | |
In the Robot view, click any moving part of the robot (head or limbs). The Motion widget appears. |
|
| If you chose a leg, hold your robot by the waist/torso to prevent it to fall down. | |
Make sure the Stiffness is off. If not, click the Stiffen chain on/of button. |
|
Move the real robot manually. Simulated and real robots move together. |
Storing joint value using the Motion widget¶
To store a joint value using the Motion widget:
| Step | Action |
|---|---|
| Make sure a Timeline box is opened. | |
| Click on the Timeline in order to select the Motion keyframe you want to modify. | |
In the Robot view, click any moving part of the robot (head or limbs). The Motion widget appears. |
|
Use one of the Sliders or click the The Record button becomes red |
Note
You can register new joints in the timeline by right-clicking on it and using the “Store” commands.
Deleting joint value using the Motion widget¶
To delete a joint value in a Motion keyframe:
| Step | Action |
|---|---|
| Click on the Motion keyframe you want to modify. | |
In the Robot view, click any moving part of the robot (head or limbs). The Motion widget appears. |
|
Click the the Record button becomes black and white |
For further details, see: