ALNavigation¶
Overview | API
What it does¶
ALNavigation is a first attempt to make the robot go safely to a different pose (i.e. location + orientation). The robot cannot yet avoid obstacles, but it is able to move cautiously, stopping as soon as an obstacle enters its security zone.
It provides an enhanced variant of ALMotionProxy::moveTo(), managing a security distance.
How it works¶
While moving forward, the robot tries to detect obstacles in front of him, using its bumpers and sonars.
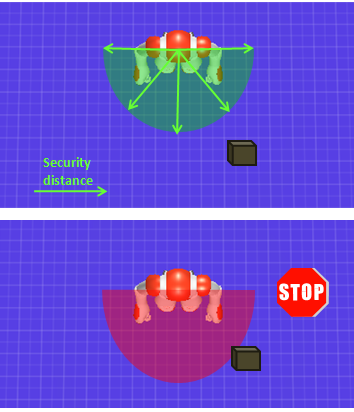
As soon as an obstacle enters its security area, the robot stops.
Security distance¶
The ALNavigationProxy::setSecurityDistance() allows you to set the radius of the semicircle in front of the robot where obstacles are detected.
Default value: 0.40m.
It is centered on FRAME_ROBOT.
Note that the center of FRAME_ROBOT is not on the surface of the robot, so the distance between, for example the foot of the robot and an obstacle will be smaller than the security distance.
The security distance must be positive, if you try to set a negative distance it will be set to 0.0m.
Performances and limitations¶
- No obstacle avoidance.
- Bumpers usually detect obstacles from 0.10 m to 0.17 m in the FRAME_ROBOT.
- Sonars detection detect obstacle from 0.30 m to 2.60 m in the FRAME_ROBOT.
Threshold values¶
- 0.40 m: allows detecting objects with both Sonars and Bumpers.
- Less than 0.30 m: is under the minimum sonar detection distance, so the robot will stop only if it bumps on an obstacle.
- Less than 0.10 m: the robot will not stop, even if it bumps on something.
Getting Started¶
Using Choregraphe¶
The most straightforward way to start using ALNavigation is:
- Use the Motions > Move To box.
- Activate the Secure moveTo (Stop if obstacle) option.
Python script¶
from naoqi import ALProxy
# Set here your robot's IP.
ip = "<your_robot_ip_address>"
navigationProxy = ALProxy("ALNavigation", ip, 9559)
# No specific move config.
navigationProxy.moveTo(1.0, 0.0, 0.0)
navigationProxy.moveTo(1.0, 0.0, 0.0, [])
# To do 6 cm steps instead of 4 cm.
navigationProxy.moveTo(1.0, 0.0, 0.0, [["MaxStepX", "0.06"]])
# Will stop at 0.5m (FRAME_ROBOT) instead of 0.4m away from the obstacle.
navigationProxy.setSecurityDistance(0.5)