Joints - V 3.2¶
Head joints¶
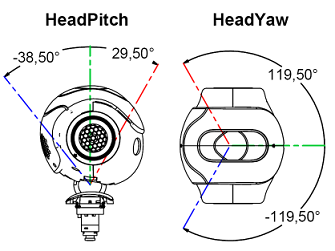
Motion range
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -38.5 to 29.5 | -0.6720 to 0.5149 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/HeadPitch/Position/Actuator/Value
Device/SubDeviceList/HeadYaw/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/HeadPitch/Position/Sensor/Value
Device/SubDeviceList/HeadYaw/Position/Sensor/Value
Anti collision limitation
Due to potential shell collision at the head level, the Pitch motion range is limited according to the Yaw value.
| HeadYaw | HeadPitch Min | HeadPitch Max | HeadYaw | HeadPitch Min | HeadPitch Max | |
|---|---|---|---|---|---|---|
| (degrees) | (radians) | |||||
| -119.52 | -25.73 | 18.91 | -2.086017 | -0.449073 | 0.330041 | |
| -87.49 | -18.91 | 11.46 | -1.526988 | -0.330041 | 0.200015 | |
| -62.45 | -24.64 | 17.19 | -1.089958 | -0.430049 | 0.300022 | |
| -51.74 | -27.50 | 18.91 | -0.903033 | -0.479965 | 0.330041 | |
| -43.32 | -31.40 | 21.20 | -0.756077 | -0.548033 | 0.370010 | |
| -27.85 | -38.50 | 24.18 | -0.486074 | -0.671951 | 0.422021 | |
| 0.0 | -38.50 | 29.51 | 0.000000 | -0.671951 | 0.515047 | |
| 27.85 | -38.50 | 24.18 | 0.486074 | -0.671951 | 0.422021 | |
| 43.32 | -31.40 | 21.20 | 0.756077 | -0.548033 | 0.370010 | |
| 51.74 | -27.50 | 18.91 | 0.903033 | -0.479965 | 0.330041 | |
| 62.45 | -24.64 | 17.19 | 1.089958 | -0.430049 | 0.300022 | |
| 87.49 | -18.91 | 11.46 | 1.526988 | -0.330041 | 0.200015 | |
| 119.52 | -25.73 | 18.91 | 2.086017 | -0.449073 | 0.330041 | |
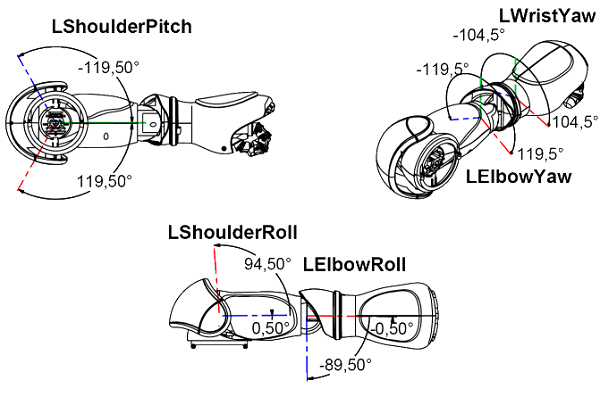
Left Arm joints¶
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| LShoulderPitch | Left shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LShoulderRoll | Left shoulder joint right and left (Z) | 0.5 to 94.5 | 0.0087 to 1.6494 |
| LElbowYaw | Left shoulder joint twist (X) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LElbowRoll | Left elbow joint (Z) | -89.5 to -0.5 | -1.5621 to -0.0087 |
| LWristYaw | Left wrist joint (X) | -104.5 to 104.5 | -1.8238 to 1.8238 |
| LHand | Left hand | Open and Close | Open and Close |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/LShoulderPitch/Position/Actuator/Value
Device/SubDeviceList/LShoulderRoll/Position/Actuator/Value
Device/SubDeviceList/LElbowYaw/Position/Actuator/Value
Device/SubDeviceList/LWristYaw/Position/Actuator/Value
Device/SubDeviceList/LHand/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/LShoulderPitch/Position/Sensor/Value
Device/SubDeviceList/LShoulderRoll/Position/Sensor/Value
Device/SubDeviceList/LElbowYaw/Position/Sensor/Value
Device/SubDeviceList/LWristYaw/Position/Sensor/Value
Device/SubDeviceList/LHand/Position/Sensor/Value
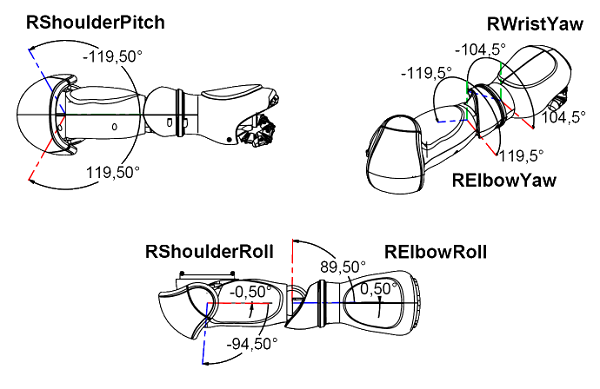
Right Arm joints¶
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| RShoulderPitch | Right shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RShoulderRoll | Right shoulder joint right and left (Z) | -94.5 to -0.5 | -1.6494 to -0.0087 |
| RElbowYaw | Right shoulder joint twist (X) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RElbowRoll | Right elbow joint (Z) | 0.5 to 89.5 | 0.0087 to 1.5621 |
| RWristYaw | Right wrist joint (X) | -104.5 to 104.5 | -1.8238 to 1.8238 |
| RHand | Right hand | Open and Close | Open and Close |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/RShoulderPitch/Position/Actuator/Value
Device/SubDeviceList/RShoulderRoll/Position/Actuator/Value
Device/SubDeviceList/RElbowYaw/Position/Actuator/Value
Device/SubDeviceList/RWristYaw/Position/Actuator/Value
Device/SubDeviceList/RHand/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/RShoulderPitch/Position/Sensor/Value
Device/SubDeviceList/RShoulderRoll/Position/Sensor/Value
Device/SubDeviceList/RElbowYaw/Position/Sensor/Value
Device/SubDeviceList/RWristYaw/Position/Sensor/Value
Device/SubDeviceList/RHand/Position/Sensor/Value
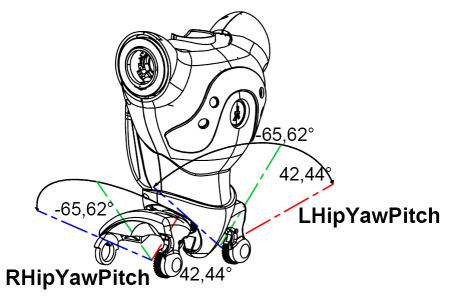
Pelvis joints¶
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| LHipYawPitch* | Left hip joint twist (Y-Z 45°) | -65.62 to 42.44 | -1.145303 to 0.740810 |
| RHipYawPitch* | Right hip joint twist (Y-Z 45°) | -65.62 to 42.44 | -1.145303 to 0.740810 |
Note
LHipYawPitch and RHipYawPitch are physically just one motor so they cannot be controlled independently.
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/LHipYawPitch/Position/Actuator/Value
Device/SubDeviceList/RHipYawPitch/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/LHipYawPitch/Position/Sensor/Value
Device/SubDeviceList/RHipYawPitch/Position/Sensor/Value
Left Leg joints¶
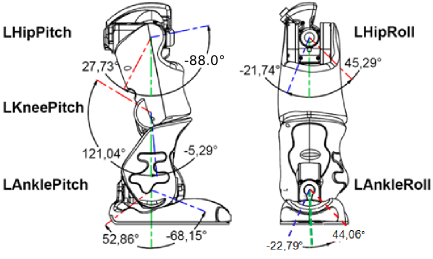
Motion range
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| LHipRoll | Left hip joint right and left (X) | -21.74 to 45.29 | -0.379472 to 0.790477 |
| LHipPitch | Left hip joint front and back (Y) | -88.00 to 27.73 | -1.535889 to 0.484090 |
| LKneePitch | Left knee joint (Y) | -5.29 to 121.04 | -0.092346 to 2.112528 |
| LAnklePitch | Left ankle joint front and back (Y) | -68.15 to 52.86 | -1.189516 to 0.922747 |
| LAnkleRoll | Left ankle joint right and left (X) | -22.79 to 44.06 | -0.397880 to 0.769001 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/LHipRoll/Position/Actuator/Value
Device/SubDeviceList/LHipPitch/Position/Actuator/Value
Device/SubDeviceList/LKneePitch/Position/Actuator/Value
Device/SubDeviceList/LAnklePitch/Position/Actuator/Value
Device/SubDeviceList/LAnkleRoll/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/LHipRoll/Position/Sensor/Value
Device/SubDeviceList/LHipPitch/Position/Sensor/Value
Device/SubDeviceList/LKneePitch/Position/Sensor/Value
Device/SubDeviceList/LAnklePitch/Position/Sensor/Value
Device/SubDeviceList/LAnkleRoll/Position/Sensor/Value
Anti collision limitation
Due to potential shell collision at the ankle level, the Roll motion range is limited according to the Pitch value.
| LAnklePitch | LAnkleRoll Min | LAnkleRoll Max | LAnklePitch | LAnkleRoll Min | LAnkleRoll Max | |
|---|---|---|---|---|---|---|
| (degrees) | (radians) | |||||
| -68.15 | -2.86 | 4.30 | -1.189442 | -0.049916 | 0.075049 | |
| -48.13 | -10.31 | 9.74 | -0.840027 | -0.179943 | 0.169995 | |
| -40.11 | -22.80 | 12.61 | -0.700051 | -0.397935 | 0.220086 | |
| -25.78 | -22.80 | 44.06 | -0.449946 | -0.397935 | 0.768992 | |
| 5.73 | -22.80 | 44.06 | 0.100007 | -0.397935 | 0.768992 | |
| 20.05 | -22.80 | 31.54 | 0.349938 | -0.397935 | 0.550477 | |
| 52.87 | 0.00 | 2.86 | 0.922755 | -0.000000 | 0.049916 | |
Right Leg joints¶
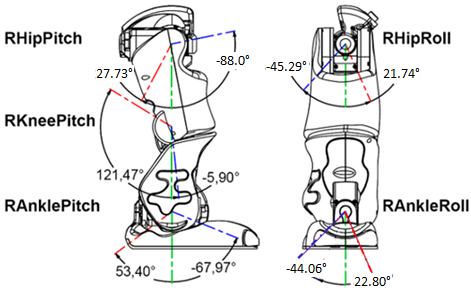
Motion range
| Joint name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| RHipRoll | Right hip joint right and left (X) | -45.29 to 21.74 | -0.790477 to 0.379472 |
| RHipPitch | Right hip joint front and back (Y) | -88.00 to 27.73 | -1.535889 to 0.484090 |
| RKneePitch | Right knee joint (Y) | -5.90 to 121.47 | -0.103083 to 2.120198 |
| RAnklePitch | Right ankle joint front and back (Y) | -67.97 to 53.40 | -1.186448 to 0.932056 |
| RAnkleRoll | Right ankle joint right and left (X) | -44.06 to 22.80 | -0.768992 to 0.397935 |
Access value by using ALMemory key name
Command(radians):
Device/SubDeviceList/RHipRoll/Position/Actuator/Value
Device/SubDeviceList/RHipPitch/Position/Actuator/Value
Device/SubDeviceList/RKneePitch/Position/Actuator/Value
Device/SubDeviceList/RAnklePitch/Position/Actuator/Value
Device/SubDeviceList/RAnkleRoll/Position/Actuator/Value
Sensor(radians):
Device/SubDeviceList/RHipRoll/Position/Sensor/Value
Device/SubDeviceList/RHipPitch/Position/Sensor/Value
Device/SubDeviceList/RKneePitch/Position/Sensor/Value
Device/SubDeviceList/RAnklePitch/Position/Sensor/Value
Device/SubDeviceList/RAnkleRoll/Position/Sensor/Value
Anti collision limitation
Due to potential shell collision at the ankle level, the Roll motion range is limited according to the Pitch value.
| RAnklePitch | RAnkleRoll Min | RAnkleRoll Max | RAnklePitch | RAnkleRoll Min | RAnkleRoll Max | |
|---|---|---|---|---|---|---|
| (degrees) | (radians) | |||||
| -68.15 | -4.30 | 2.86 | -1.189442 | -0.075049 | 0.049916 | |
| -48.13 | -9.74 | 10.31 | -0.840027 | -0.169995 | 0.179943 | |
| -40.11 | -12.61 | 22.80 | -0.700051 | -0.220086 | 0.397935 | |
| -25.78 | -44.06 | 22.80 | -0.449946 | -0.768992 | 0.397935 | |
| 5.73 | -44.06 | 22.80 | 0.100007 | -0.768992 | 0.397935 | |
| 20.05 | -31.54 | 22.80 | 0.349938 | -0.550477 | 0.397935 | |
| 52.87 | -2.86 | 0.00 | 0.922755 | -0.049916 | 0.000000 | |