Body frames
All solids (S) and local coordinate system are described relative to the
zero posture: standing with straight leg and arms pointing forwards.
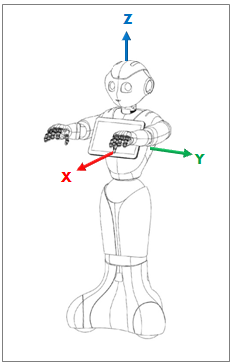
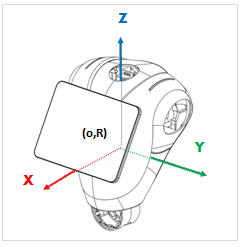
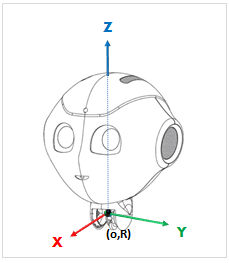
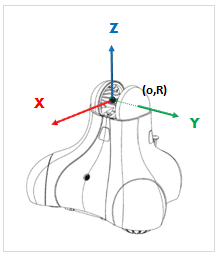
Torso
(o, R) is located on: Torso.
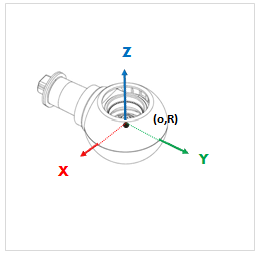
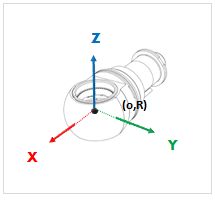
Neck
(o, R) is located on: HeadYaw.
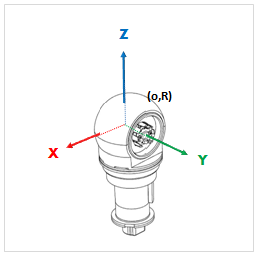
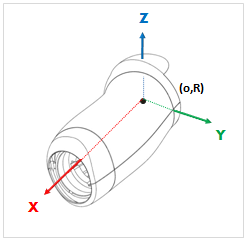
Head
(o, R) is located on: HeadPitch.
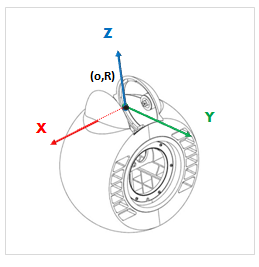
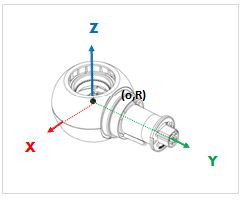
Left Shoulder
(o, R) is located on: LShoulderPitch.
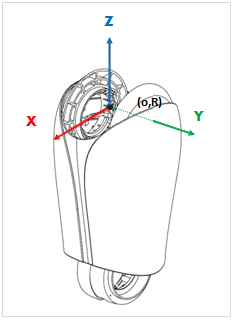
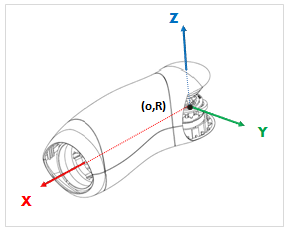
Left Bicep
(o, R) is located on: LShoulderRoll.
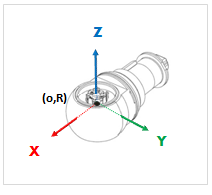
Left Elbow
(o, R) is located on: LElbowYaw.
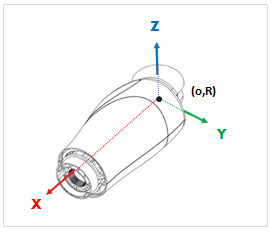
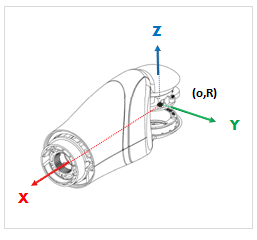
Left ForeArm
(o, R) is located on: LElbowRoll.
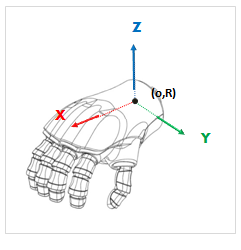
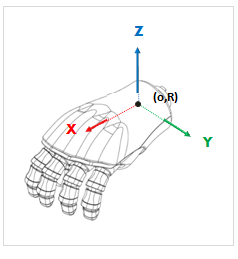
Left Hand with fingers
(o, R) is located on: LWristYaw.
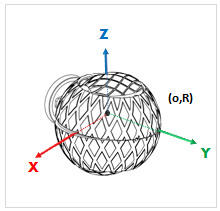
Hip
(o, R) is located on: HipRoll.
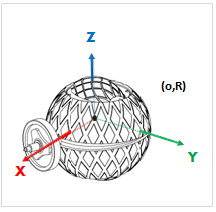
Thighs
(o, R) is located on: HipPitch.
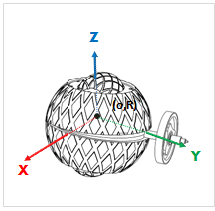
Base
(o, R) is located on: KneePitch.
Wheel - Front Left
(o, R) is located on: WheelFL.
Wheel - Front Right
(o, R) is located on: WheelFR.
Wheel - Back
(o, R) is located on: WheelB.
Right Shoulder
(o, R) is located on: RShoulderPitch.
Right Bicep
(o, R) is located on: RShoulderRoll.
Right Elbow
(o, R) is located on: RElbowYaw.
Right ForeArm
(o, R) is located on: RElbowRoll.
Right Hand with fingers
(o, R) is located on: RWristYaw.