Chain & Effector definitions¶
Body, Chains and Effectors in one glance:
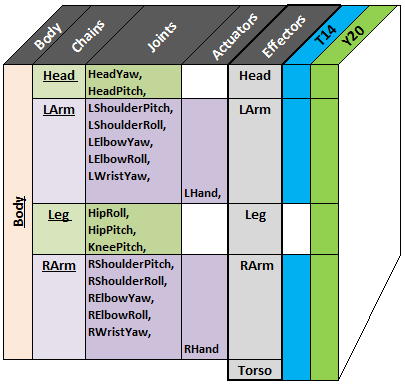
- Body
- = all Joints + the 2 Actuators (RHand and LHand) added at the end of the arm links.
Chains¶
A Chain may contain:
- the Joints of a limb (Head, Leg) or
- the Joints + the Actuators of a limb (LArm, RArm).
The table below lists the chains and all the Joints and Actuators included in each:
| Body is ... | Head + LArm + Leg + RArm | |||
|---|---|---|---|---|
| The chain ... | Head | LArm | Leg | RArm |
| involves ... | HeadYaw | LShoulderPitch | HipRoll | RShoulderPitch |
| HeadPitch | LShoulderRoll | HipPitch | RShoulderRoll | |
| LElbowYaw | KneePitch | RElbowYaw | ||
| LElbowRoll | RElbowRoll | |||
| LWristYaw | RWristYaw | |||
| LHand | RHand | |||
Effectors¶
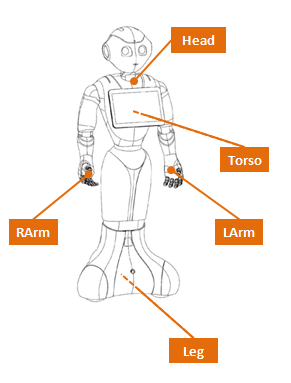
- Effector
- = Torso + the extremity of each limb. Limb Effector names are identical to the corresponding Chain names.
Effector positions are defined in relation to the position of the last joint of the chain.
| Effector name | Position | End transform | Related to ... |
|---|---|---|---|
| Head | At the neck joint | Position3D(0.0, 0.0, 0.0) | HeadPitch |
| Torso | A reference point in the torso | Position3D(0.0, 0.0, 0.0) | Torso |
| LArm | Inside the hand | Position3D(HandOffsetX, 0.0, -HandOffsetZ) | LWristYaw |
| Leg | Wheel center, at floor level | Position3D(WheelCenterOffset, 0.0, TibiaLength + WheelRadius) | KneePitch |
| RArm | Inside the hand | Position3D(HandOffsetX, 0.0, -HandOffsetZ) | RWristYaw |