Romeo - Masses¶
See also
Introduction¶
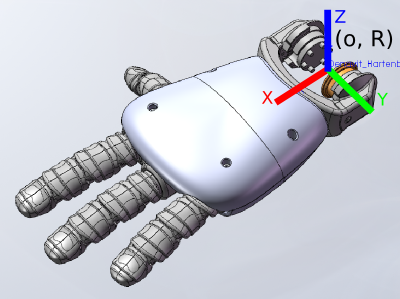
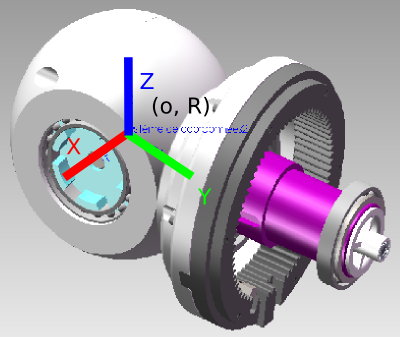
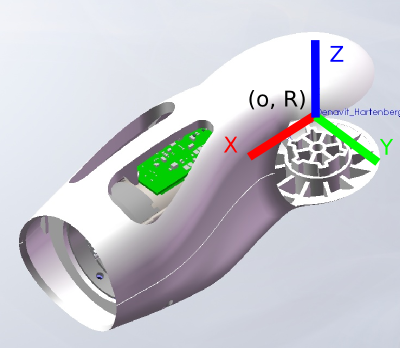
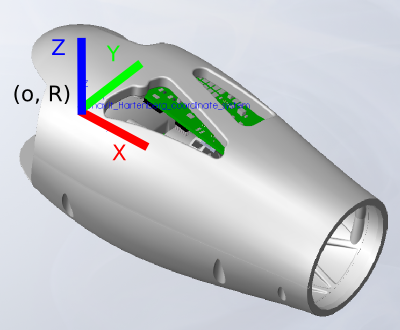
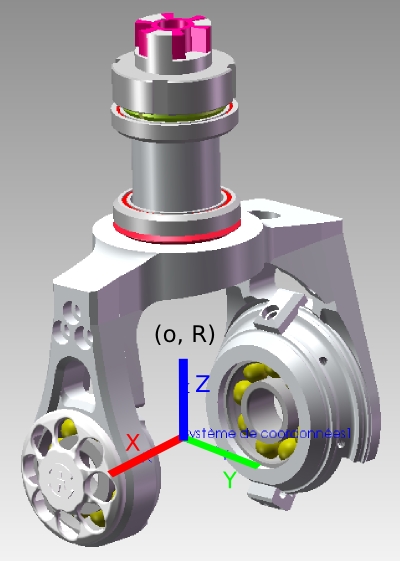
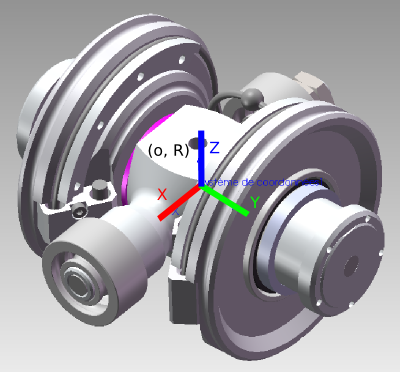
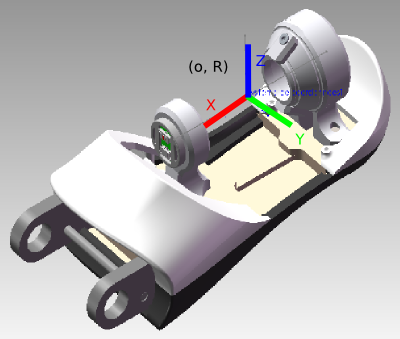
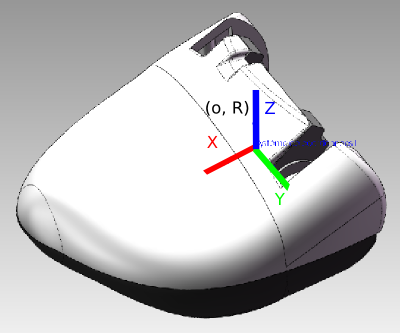
This page details the mass, center of mass and inertial matrix of each solid (S) on the right side of Romeo.
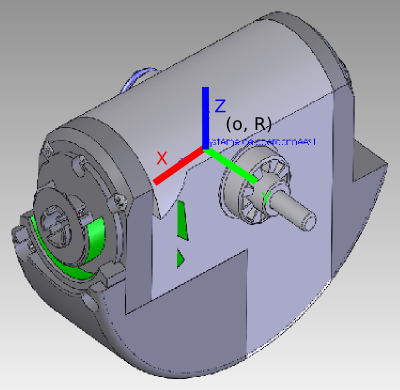
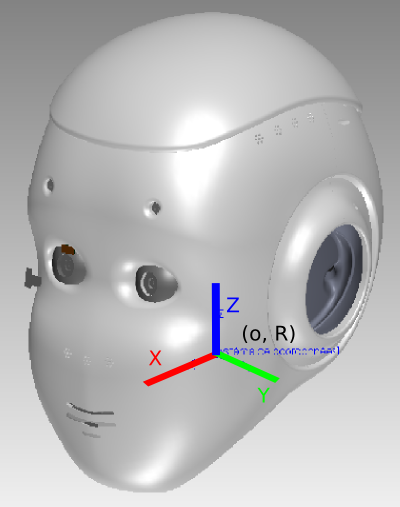
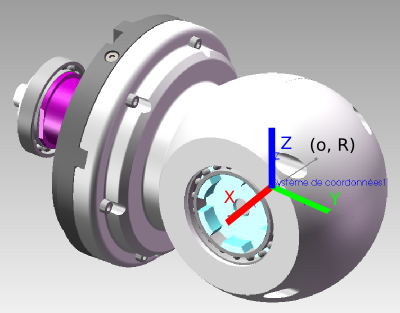
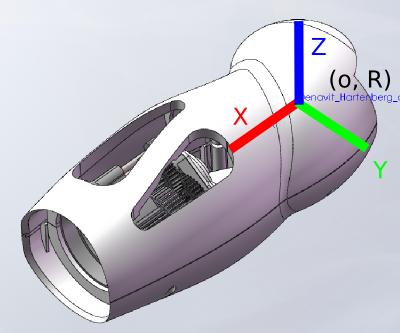
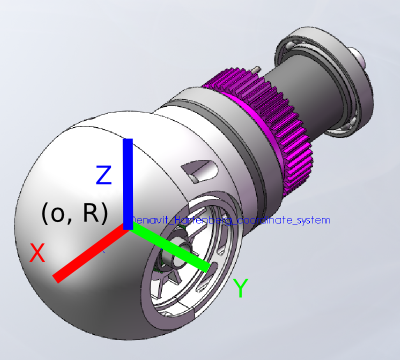
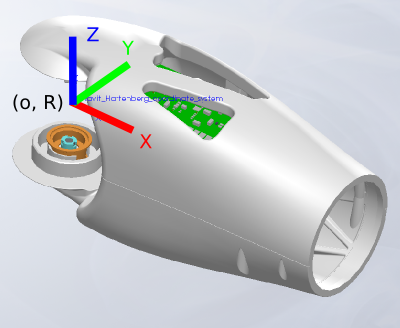
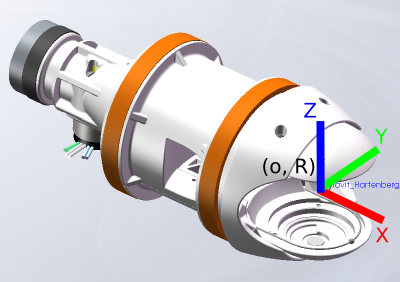
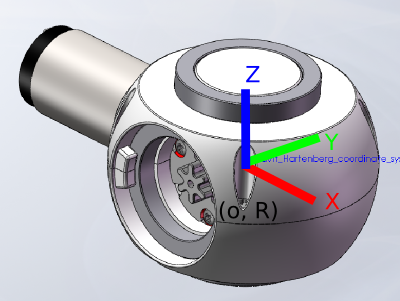
The center of mass position and the inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards).

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/24330a4dd46550ba4b30a2117a2f2a91acbf88de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/b9079a9d4c4d9fed9f05d8f905812260c08c86b5.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.03771 \\
+0.00033 \\
-0.02644
\end{array} \right]_{(o, R)}](../../_images/math/5c7959bb8bb20f22b8270d39f292614d51abadd6.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.059123600 & -0.000053627 & +0.010957853 \\
-0.000053627 & +0.056744837 & -0.000056943 \\
+0.010957853 & -0.000056943 & +0.066262400 \\
\end{array}\right]_R](../../_images/math/d3f9cc8d7eb2bb0c6a77ff69712954a47409ab48.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.02825 \\
+0.00045 \\
-0.16653
\end{array} \right]_{(o, R)}](../../_images/math/a24b44e79165c7ca79e6081c633661e27f5e0cb5.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.171121478 & +0.000062701 & -0.028881225 \\
+0.000062701 & +0.170918235 & -0.000029272 \\
-0.028881225 & -0.000029272 & +0.021811118 \\
\end{array}\right]_R](../../_images/math/7c2c140019240127068eb0c1eb03482f82044e55.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00105 \\
0.00003 \\
-0.03065
\end{array} \right]_{(o, R)}](../../_images/math/65a5dabf41cfe40d4061fd6e8be6a29c4891da81.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000549 & -0.000000 & 0.000006 \\
-0.000000 & 0.000533 & -0.000001 \\
0.000006 & -0.000001 & 0.000074
\end{array}\right]_R](../../_images/math/e386466635729230cafd4de8bf09b4f002769600.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.00372 \\
0.00241 \\
0.04811
\end{array} \right]_{(o, R)}](../../_images/math/d4bfa979a4e9e6a553548e3c17e8692db4f647af.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.001105 & -0.000002 & 0.000058 \\
-0.000002 & 0.001081 & 0.000050 \\
0.000058 & 0.000050 & 0.000268
\end{array}\right]_R](../../_images/math/261a97c29221f4a26afed8c049870ceddfa75813.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.0014 \\
0.00001 \\
-0.00462
\end{array} \right]_{(o, R)}](../../_images/math/fe512f2cc739b875845ce64bf5b4c85a084d83cc.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000025 & 0.000000 & -0.000012 \\
0.000000 & 0.000068 & -0.000000 \\
-0.000012 & -0.000000 & 0.000058
\end{array}\right]_R](../../_images/math/448f1e329b67bdc6adcfa1f35a3942e9f8f93149.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.01263 \\
+0.00181 \\
+0.07498
\end{array} \right]_{(o, R)}](../../_images/math/fc68a0a84c69b89f2f097ee5f06f0ce06ae21097.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.015776 & -0.000000 & 0.000706 \\
-0.000000 & 0.017605 & 0.000186 \\
0.000706 & 0.000186 & 0.007703
\end{array}\right]_R](../../_images/math/023be5c8325b427679f4f2b46695f050698eedca.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00079 \\
-0.02878 \\
+0.00012
\end{array} \right]_{(o, R)}](../../_images/math/32ddec51985a82e364fd869d8447ba078289b660.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000669 & 0.000003 & -0.000002 \\
0.000003 & 0.000110 & -0.000008 \\
-0.000002 & -0.000008 & 0.000652
\end{array}\right]_R](../../_images/math/ba5774c925780aec3d3e3dd9a4ba19283ccb008c.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.09638 \\
+0.00372 \\
+0.00629
\end{array} \right]_{(o, R)}](../../_images/math/99ec97dc2b75e4d4cb424a7dcb3aaac47cdc0a3c.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000919 & 0.000095 & 0.000484 \\
0.000095 & 0.008967 & 0.000003 \\
0.000484 & 0.000003 & 0.008849
\end{array}\right]_R](../../_images/math/afa697cb39abe2b055154a0d9d5602e0d3cfcc7a.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.03493 \\
-0.00067 \\
+0.00009
\end{array} \right]_{(o, R)}](../../_images/math/592374ffb0c6cb20feba58f20d433f26f51d3887.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000166 & 0.000002 & -0.000004 \\
0.000002 & 0.000997 & 0.000001 \\
-0.000004 & 0.000001 & 0.000957
\end{array}\right]_R](../../_images/math/4e3af6080b29e22bb8b4ae4dd61608443447afd0.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.06866 \\
+0.00970 \\
-0.00148
\end{array} \right]_{(o, R)}](../../_images/math/55aeb57649679e3153ef0ffe116bb2c930e8f98b.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000444 & 0.000225 & 0.000014 \\
0.000225 & 0.002772 & 0.000003 \\
0.000014 & 0.000003 & 0.002763
\end{array}\right]_R](../../_images/math/618dc4ba1a3c985d8cde81472706acb5d0af7155.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.05925 \\
-0.00006 \\
-0.00122
\end{array} \right]_{(o, R)}](../../_images/math/9e5d068a7ce5efbcefb22ddcceedad650bea559d.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000078 & -0.000001 & -0.000014 \\
-0.000001 & 0.000925 & -0.000000 \\
-0.000014 & -0.000000 & 0.000913
\end{array}\right]_R](../../_images/math/a785194a1d8debcb69e9db5fa8f4117855ad4296.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00657 \\
-0.00017 \\
+0.00018
\end{array} \right]_{(o, R)}](../../_images/math/0b3c6a432a8d309d68200498178c3f463521cfea.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000012 & 0.000000 & 0.000000 \\
0.000000 & 0.000031 & 0.000000 \\
0.000000 & 0.000000 & 0.000031
\end{array}\right]_R](../../_images/math/84da8c19415c399ac8d8952da72285f4c7d51bc7.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.07358 \\
-0.00628 \\
-0.00098
\end{array} \right]_{(o, R)}](../../_images/math/81dbbdb599851f5ad5da73db8b9d1feca09f3181.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000340 & -0.000161 & 0.000041 \\
-0.000161 & 0.002592 & 0.000061 \\
0.000041 & 0.000061 & 0.002759
\end{array}\right]_R](../../_images/math/fd9344b90d7598e3798387f760f8ba6949c5ef3a.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00079 \\
+0.02878 \\
+0.00012
\end{array} \right]_{(o, R)}](../../_images/math/04bf26ef291accc4e691872593a21a162f274150.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.09638 \\
-0.00372 \\
+0.00629
\end{array} \right]_{(o, R)}](../../_images/math/fd891b804db740a19b0dda9dbb2edf8c154c78c9.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.03493 \\
+0.00067 \\
+0.00009
\end{array} \right]_{(o, R)}](../../_images/math/20995f9a33fbaabee5459b0617a0a7c3bcbe7d49.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.06866 \\
-0.00970 \\
-0.00148
\end{array} \right]_{(o, R)}](../../_images/math/507d9f58d1fc8bf36e65101455f40b754bb51818.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.05925 \\
+0.00006 \\
-0.00122
\end{array} \right]_{(o, R)}](../../_images/math/a2b41d12ba6e842e3339cc12b3b4993aadca8052.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.00657 \\
+0.00017 \\
+0.00018
\end{array} \right]_{(o, R)}](../../_images/math/7d2963de62dac4fd5ad8810ea57fcb66c02b267c.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.07358 \\
+0.00628 \\
-0.00098
\end{array} \right]_{(o, R)}](../../_images/math/b1fd8d7ca8988aa03e9a4169cac3f7ed1fb0ebfd.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000340 & -0.000161 & 0.000041 \\
-0.000161 & 0.002592 & 0.000061 \\
0.000041 & 0.000061 & 0.002759
\end{array}\right]_R](../../_images/math/648e1fdddb05c67d599f5e03546d86c37b577f28.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00922 \\
-0.00167 \\
+0.04200
\end{array} \right]_{(o, R)}](../../_images/math/99ef668b23e80f861660ffc937734935050a2187.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.001708 & -0.000009 & -0.000032 \\
-0.000009 & 0.002270 & 0.000040 \\
-0.000032 & 0.000040 & 0.000830
\end{array}\right]_R](../../_images/math/6bfe09c962c78fc3fc37abc10df6ff5f01d605f7.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00249 \\
-0.00205 \\
-0.00147
\end{array} \right]_{(o, R)}](../../_images/math/84581aedd4ec25ab443f9b5af0022f9565c1f7e4.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000868 & -0.000003 & 0.000001 \\
-0.000003 & 0.000511 & -0.000001 \\
0.000001 & -0.000001 & 0.000945
\end{array}\right]_R](../../_images/math/41dad5638454bb22d82a0b1b3d61a0259d36f90e.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.02138 \\
+0.00255 \\
-0.14577
\end{array} \right]_{(o, R)}](../../_images/math/d6595afd1fc01bd48711c2c266bbb098a0e37b41.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.128271 & -0.000259 & 0.009517 \\
-0.000259 & 0.130634 & -0.000957 \\
0.009517 & -0.000957 & 0.013310
\end{array}\right]_R](../../_images/math/6877e9e6afd42d760c52b19e44146a53179ce2c4.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00415 \\
-0.00054 \\
-0.11011
\end{array} \right]_{(o, R)}](../../_images/math/b42e9fa0c331fb45eda0496b3081051459860f7a.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.045084 & -0.000006 & 0.001636 \\
-0.000006 & 0.045030 & -0.000155 \\
0.001636 & -0.000155 & 0.003446
\end{array}\right]_R](../../_images/math/7d909e7067950f785536cecc0044d9c939be851b.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00132 \\
-0.00117 \\
+0.00015
\end{array} \right]_{(o, R)}](../../_images/math/a492b2cd9dba3d887f04f296f924062675538e70.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000339 & 0.000001 & 0.000000 \\
0.000001 & 0.000221 & -0.000001 \\
0.000000 & -0.000001 & 0.000393
\end{array}\right]_R](../../_images/math/832c2f6af080c4b80ec943db8afee408ad5b5fa6.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.01872 \\
+0.00223 \\
-0.03215
\end{array} \right]_{(o, R)}](../../_images/math/e84385e4d9295b1d810c6a82bdb2633e33f3976b.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.003507 & 0.000000 & 0.000000 \\
0.000000 & 0.016213 & 0.000000 \\
0.000000 & 0.000000 & 0.014735
\end{array}\right]_R](../../_images/math/2e5a4c873b6fd529dea62a1cb560a7099e86777c.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.02067 \\
-0.00198 \\
-0.00964
\end{array} \right]_{(o, R)}](../../_images/math/0d1c49abf1a9249e0fc31dadce01abdb8eb9f0e5.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.000232177 & +0.000026659 & -0.000059566 \\
+0.000026659 & +0.000296598 & -0.000002851 \\
-0.000059566 & -0.000002851 & +0.000427637
\end{array}\right]_R](../../_images/math/d2de215b66308883cbc88bc5b40550669818d7ac.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.058348\\
0.0012683\\
-0.04418
\end{array}
\right]_{(o, R)}](../../_images/math/c861d54aa93ebbf4b7d0f557511cf6e3c2cebd2e.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.002692297101 & 5.4759551858e-05 & 0.0022321233992\\
5.4759551858e-05 & 0.009621700272 & -2.5281060516e-05\\
0.0022321233992 & -2.5281060516e-05 & 0.007901834324\\
\end{array}
\right]_R](../../_images/math/c480d5f2be40c2957d6c97fe20d754bfda828c6f.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00922 \\
+0.00167 \\
+0.04200
\end{array} \right]_{(o, R)}](../../_images/math/873183a3809a5b04889db626d7c614f1751c7647.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00249 \\
+0.00205 \\
-0.00147
\end{array} \right]_{(o, R)}](../../_images/math/f071edf6e2315c305a88b0612d2993d2570913c3.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.02138 \\
-0.00255 \\
-0.14577
\end{array} \right]_{(o, R)}](../../_images/math/37cc7b7b22d4d5f4877c79729cbb3736241736c8.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.00415 \\
+0.00054 \\
-0.11011
\end{array} \right]_{(o, R)}](../../_images/math/0248dbe70d5073b76c598f4515835f93c897dd0e.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00132 \\
+0.00117 \\
+0.00015
\end{array} \right]_{(o, R)}](../../_images/math/8c7efac5c043098895019d12f432eb2118235f34.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.01872 \\
-0.00223 \\
-0.03215
\end{array} \right]_{(o, R)}](../../_images/math/e4c401da5a255dffecbcfee62c7a7f2048bc6491.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.02067 \\
+0.00198 \\
-0.00964
\end{array} \right]_{(o, R)}](../../_images/math/34e46182adc6057e9b872f9e83332940b65dddee.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.000232177 & +0.000026659 & +0.000059566 \\
+0.000026659 & +0.000296598 & -0.000002851 \\
-0.000059566 & -0.000002851 & +0.000427637
\end{array}\right]_R](../../_images/math/1042e102ebafdef72c1806f627e31fffce516bbc.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
0.058348\\
-0.0012683\\
-0.04418
\end{array}
\right]_{(o, R)}](../../_images/math/2ff703d29f08e827650e840d0615736daaf292ac.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.002692297101 & -5.4759551858e-05 & 0.0022321233992\\
-5.4759551858e-05 & 0.009621700272 & 2.5281060516e-05\\
0.0022321233992 & 2.5281060516e-05 & 0.007901834324\\
\end{array}
\right]_R](../../_images/math/9c62257557e943c4397adc3272f0b8c41fc6833c.png)
