Romeo - Masses¶
See also
Introduction¶
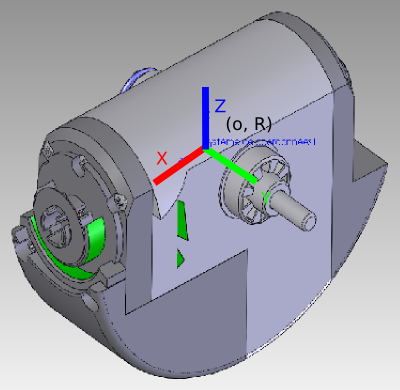
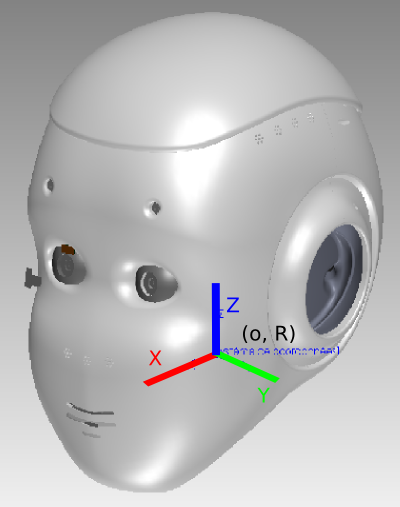
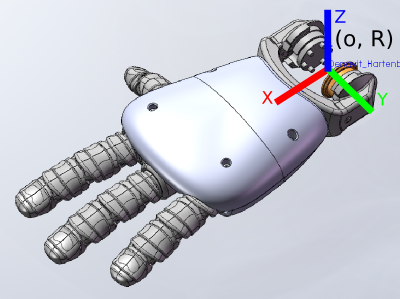
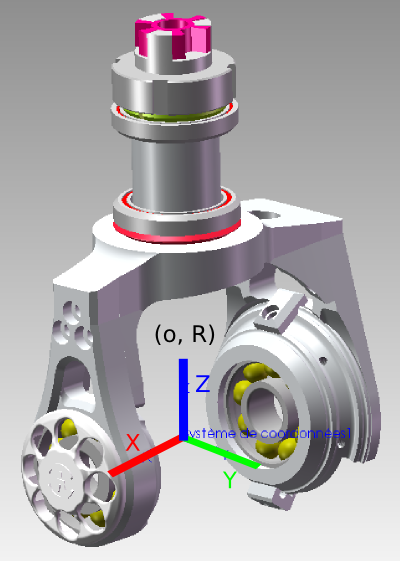
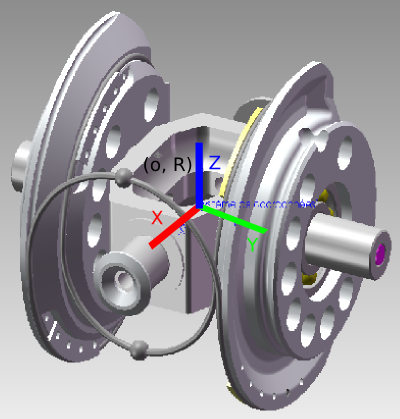
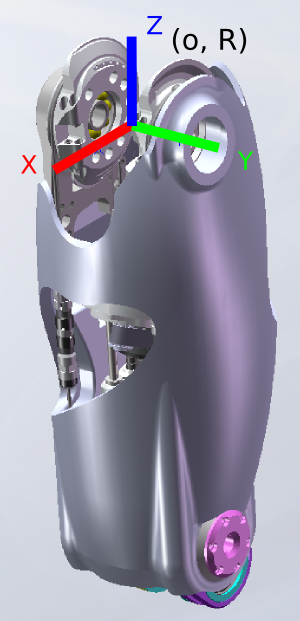
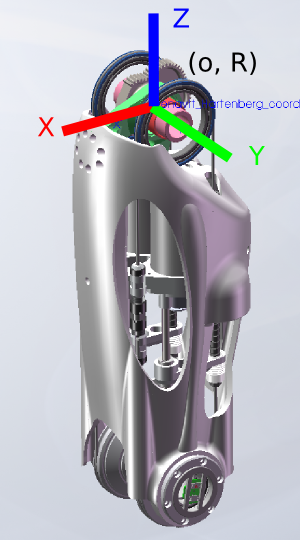
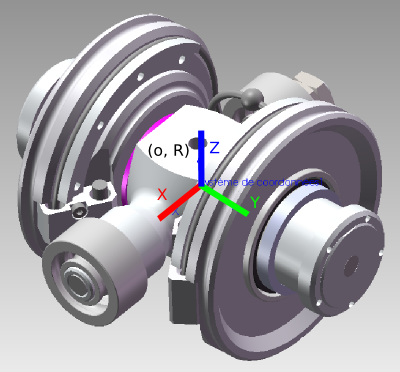
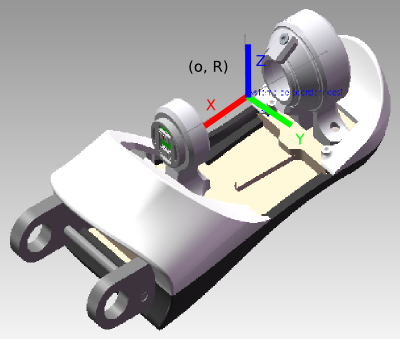
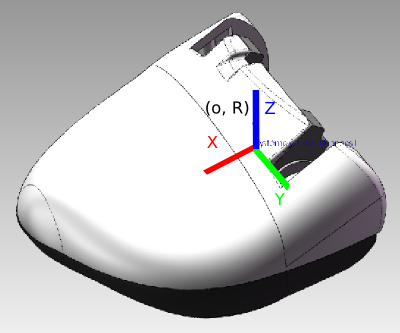
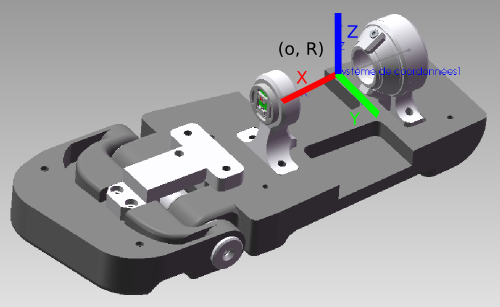
This page details the mass, center of mass and inertial matrix of each solid (S) on the right side of Romeo.
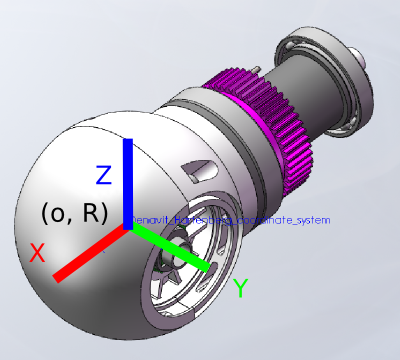
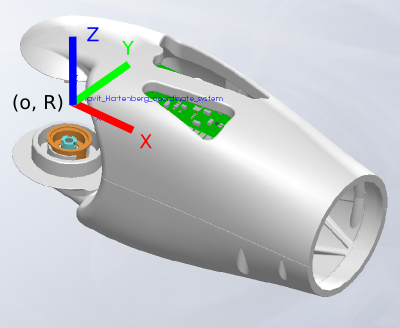
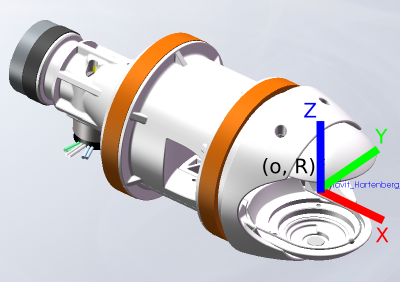
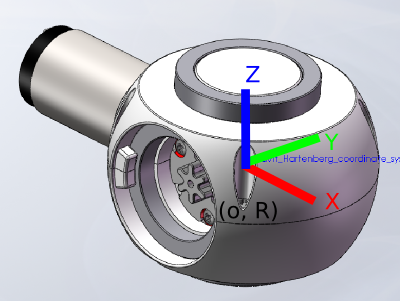
The center of mass position and the inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards).

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.03771 \\
+0.00033 \\
-0.02644
\end{array} \right]_{(o, R)}](../../_images/math/4ad8aad0d59b2916b9cacbf5f8c176abe6368113.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.059123600 & -0.000053627 & +0.010957853 \\
-0.000053627 & +0.056744837 & -0.000056943 \\
+0.010957853 & -0.000056943 & +0.066262400 \\
\end{array}\right]_R](../../_images/math/b0b91718cfc64582abb96999b20cfb4e39edfa8c.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.02825 \\
+0.00045 \\
-0.16653
\end{array} \right]_{(o, R)}](../../_images/math/deaf932a2483b8654e0af0b5b21dbec11a4bd438.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.171121478 & +0.000062701 & -0.028881225 \\
+0.000062701 & +0.170918235 & -0.000029272 \\
-0.028881225 & -0.000029272 & +0.021811118 \\
\end{array}\right]_R](../../_images/math/fca4c5944e27c9ad380dceafe49eec97b59e8d91.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00105 \\
0.00003 \\
-0.03065
\end{array} \right]_{(o, R)}](../../_images/math/c2a40eac269a29e012a82c5ac01e5644d70e7a48.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000549 & -0.000000 & 0.000006 \\
-0.000000 & 0.000533 & -0.000001 \\
0.000006 & -0.000001 & 0.000074
\end{array}\right]_R](../../_images/math/84bc05b6281a6ebbf0dfe201074f9c9cc2e42608.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.00372 \\
0.00241 \\
0.04811
\end{array} \right]_{(o, R)}](../../_images/math/f30b3a8d4296509f8245622ecca882fa4656f866.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.001105 & -0.000002 & 0.000058 \\
-0.000002 & 0.001081 & 0.000050 \\
0.000058 & 0.000050 & 0.000268
\end{array}\right]_R](../../_images/math/ee61d9f60a64cfb94e11dafa0e82b20eb19a85bb.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.0014 \\
0.00001 \\
-0.00462
\end{array} \right]_{(o, R)}](../../_images/math/fc3b4e60ad681643026d1f4575dace6daf883e45.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000025 & 0.000000 & -0.000012 \\
0.000000 & 0.000068 & -0.000000 \\
-0.000012 & -0.000000 & 0.000058
\end{array}\right]_R](../../_images/math/398433ecfb436cab0521b6591e5b5c4e2d2bb829.png)

![\text{CoM(S)} = \left[\begin{array}{c}
0.01263 \\
+0.00181 \\
+0.07498
\end{array} \right]_{(o, R)}](../../_images/math/6fba8309a58eaa04a2affe510ae67d42d35d3869.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.015776 & -0.000000 & 0.000706 \\
-0.000000 & 0.017605 & 0.000186 \\
0.000706 & 0.000186 & 0.007703
\end{array}\right]_R](../../_images/math/f0649768b38fcaba83cb6321e4fd4358307d3611.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00079 \\
-0.02878 \\
+0.00012
\end{array} \right]_{(o, R)}](../../_images/math/f38c8812e0a577da4a9463cb3d50d51b97d77170.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000669 & 0.000003 & -0.000002 \\
0.000003 & 0.000110 & -0.000008 \\
-0.000002 & -0.000008 & 0.000652
\end{array}\right]_R](../../_images/math/f37140c05757d2b5620a44bd6b43edaf9375cbda.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.09638 \\
+0.00372 \\
+0.00629
\end{array} \right]_{(o, R)}](../../_images/math/12eac86bde5b76de5a3bf8901dc2f2ff525827b0.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000919 & 0.000095 & 0.000484 \\
0.000095 & 0.008967 & 0.000003 \\
0.000484 & 0.000003 & 0.008849
\end{array}\right]_R](../../_images/math/388aaa7d13078efce5cef801b360272015fbd296.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.03493 \\
-0.00067 \\
+0.00009
\end{array} \right]_{(o, R)}](../../_images/math/a8f574ce7b02edd7b061bc471805c5bb4d35404e.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000166 & 0.000002 & -0.000004 \\
0.000002 & 0.000997 & 0.000001 \\
-0.000004 & 0.000001 & 0.000957
\end{array}\right]_R](../../_images/math/617039961213b87341abda258d1dc58ad4b95f32.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.06866 \\
+0.00970 \\
-0.00148
\end{array} \right]_{(o, R)}](../../_images/math/94ac493b1cd76cfcb2d1467e75d07eb5389176de.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000444 & 0.000225 & 0.000014 \\
0.000225 & 0.002772 & 0.000003 \\
0.000014 & 0.000003 & 0.002763
\end{array}\right]_R](../../_images/math/ce868d91377ae1d4066c83b510b6db57df06a42a.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.05925 \\
-0.00006 \\
-0.00122
\end{array} \right]_{(o, R)}](../../_images/math/21528e6c80aa816e48bdf9437da0a84e4fa4f2ca.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000078 & -0.000001 & -0.000014 \\
-0.000001 & 0.000925 & -0.000000 \\
-0.000014 & -0.000000 & 0.000913
\end{array}\right]_R](../../_images/math/cf732f90c4eb0467c0999b51694527e78ce5eb59.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00657 \\
-0.00017 \\
+0.00018
\end{array} \right]_{(o, R)}](../../_images/math/d4c59c68933158b3b0277556ceff04dc36b55af3.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000012 & 0.000000 & 0.000000 \\
0.000000 & 0.000031 & 0.000000 \\
0.000000 & 0.000000 & 0.000031
\end{array}\right]_R](../../_images/math/ceffd6e4e2794f1ec0393fab3065a643421d5c50.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.07358 \\
-0.00628 \\
-0.00098
\end{array} \right]_{(o, R)}](../../_images/math/1d9dd873c02dcc1c9cfffa26573edf58a13fd7dc.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000340 & -0.000161 & 0.000041 \\
-0.000161 & 0.002592 & 0.000061 \\
0.000041 & 0.000061 & 0.002759
\end{array}\right]_R](../../_images/math/5a8fe83a2d288cdafaf43ec2a365b031397bb522.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00079 \\
+0.02878 \\
+0.00012
\end{array} \right]_{(o, R)}](../../_images/math/714ff8d5a764ee1c1b298c6fc08383ed600a3e2b.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.09638 \\
-0.00372 \\
+0.00629
\end{array} \right]_{(o, R)}](../../_images/math/c47a2a8a0403b5823fec5ca281ff957287b8ae48.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.03493 \\
+0.00067 \\
+0.00009
\end{array} \right]_{(o, R)}](../../_images/math/3c855f0dab7c4fac912855480a01a2dd62a21549.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.06866 \\
-0.00970 \\
-0.00148
\end{array} \right]_{(o, R)}](../../_images/math/68f3fc8d1c796e7df9e1e300ab360c8c9e113833.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.05925 \\
+0.00006 \\
-0.00122
\end{array} \right]_{(o, R)}](../../_images/math/f3e72d3ec431a4439b7e900c8950317c3178f963.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.00657 \\
+0.00017 \\
+0.00018
\end{array} \right]_{(o, R)}](../../_images/math/0ffd0763defe9f4d325c710d8f159190d2e80454.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.07358 \\
+0.00628 \\
-0.00098
\end{array} \right]_{(o, R)}](../../_images/math/7b84b7381b04968bc6cf1a30f9c291471eb2139e.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000340 & -0.000161 & 0.000041 \\
-0.000161 & 0.002592 & 0.000061 \\
0.000041 & 0.000061 & 0.002759
\end{array}\right]_R](../../_images/math/d6e5ec4800373da892d1b978063eddd3889b63e6.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00922 \\
-0.00167 \\
+0.04200
\end{array} \right]_{(o, R)}](../../_images/math/5a457f35534297c30127711db5ff1bc4744e80ea.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.001708 & -0.000009 & -0.000032 \\
-0.000009 & 0.002270 & 0.000040 \\
-0.000032 & 0.000040 & 0.000830
\end{array}\right]_R](../../_images/math/62c1fccb1ea98a3559541adb6323e4dfb2b90efc.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00249 \\
-0.00205 \\
-0.00147
\end{array} \right]_{(o, R)}](../../_images/math/48084d85dd4226c78a43c60507ae64c9d5b76acc.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000868 & -0.000003 & 0.000001 \\
-0.000003 & 0.000511 & -0.000001 \\
0.000001 & -0.000001 & 0.000945
\end{array}\right]_R](../../_images/math/6a67b58b2c9cbb0cb5cc7308c0d5a1574199b9b9.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.02138 \\
+0.00255 \\
-0.14577
\end{array} \right]_{(o, R)}](../../_images/math/8eb3793d287f6215e5d2a600b0fef4a8e95824a1.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.128271 & -0.000259 & 0.009517 \\
-0.000259 & 0.130634 & -0.000957 \\
0.009517 & -0.000957 & 0.013310
\end{array}\right]_R](../../_images/math/7fbaf51a4d9311a8441e79c4341c8cd15bb99aeb.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00415 \\
-0.00054 \\
-0.11011
\end{array} \right]_{(o, R)}](../../_images/math/17059eda7f3e54be73cac199b985e3f50296f111.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.045084 & -0.000006 & 0.001636 \\
-0.000006 & 0.045030 & -0.000155 \\
0.001636 & -0.000155 & 0.003446
\end{array}\right]_R](../../_images/math/50ff22adf054e1ee39ed5ac015873a7485452dd0.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.00132 \\
-0.00117 \\
+0.00015
\end{array} \right]_{(o, R)}](../../_images/math/6153b599632736286a99b0fdec2273fe7e8ff906.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.000339 & 0.000001 & 0.000000 \\
0.000001 & 0.000221 & -0.000001 \\
0.000000 & -0.000001 & 0.000393
\end{array}\right]_R](../../_images/math/23e7e60438411aba160ee7c615976437ecd64fd2.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.01872 \\
+0.00223 \\
-0.03215
\end{array} \right]_{(o, R)}](../../_images/math/f7d574e77d7a0f9a28e638138b8b5f03a22b7406.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
0.003507 & 0.000000 & 0.000000 \\
0.000000 & 0.016213 & 0.000000 \\
0.000000 & 0.000000 & 0.014735
\end{array}\right]_R](../../_images/math/fa2889b85c76ef6ceff3e1055464db44b215812c.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.02067 \\
-0.00198 \\
-0.00964
\end{array} \right]_{(o, R)}](../../_images/math/946ad54d59c6d8328b831a5d23c58c32464ed9ff.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.000232177 & +0.000026659 & -0.000059566 \\
+0.000026659 & +0.000296598 & -0.000002851 \\
-0.000059566 & -0.000002851 & +0.000427637
\end{array}\right]_R](../../_images/math/956fadd741d891758ffa7111a7d86d205ab1a581.png)

![\text{CoM(S)} = \left[\begin{array}{c}
+0.07856 \\
-0.00603 \\
-0.04513
\end{array} \right]_{(o, R)}](../../_images/math/91b11cb12f168c3270b2939322bd83f30aa521e0.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.00350695791 & +0.00000000000 & +0.00000000000 \\
+0.00000000000 & +0.01621291202 & +0.00000000000 \\
+0.00000000000 & +0.00000000000 & +0.01473534683
\end{array}\right]_R](../../_images/math/1683a348b97dff12fd10a35ade1f67821be9a174.png)

![\text{CoM(S)} = \left[\begin{array}{c}
-0.00922 \\
+0.00167 \\
+0.04200
\end{array} \right]_{(o, R)}](../../_images/math/a2778980d367378b44beb1f0a1d2919f4427899a.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00249 \\
+0.00205 \\
-0.00147
\end{array} \right]_{(o, R)}](../../_images/math/3e7aff3477794ec0d49be594105d321d10b99ef4.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.02138 \\
-0.00255 \\
-0.14577
\end{array} \right]_{(o, R)}](../../_images/math/c963b5368ba60972267a86ac0858f3bb81a8104f.png)
![\text{CoM(S)} = \left[\begin{array}{c}
-0.00415 \\
+0.00054 \\
-0.11011
\end{array} \right]_{(o, R)}](../../_images/math/56276cb2792cc8487ffcb259e74c38aa40f7dfbc.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.00132 \\
+0.00117 \\
+0.00015
\end{array} \right]_{(o, R)}](../../_images/math/c19b63654c468f48c85940dbabd2dfa85195b302.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.01872 \\
-0.00223 \\
-0.03215
\end{array} \right]_{(o, R)}](../../_images/math/b21e249a1e8de0c0aaf728e9808a674d0e22d749.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.02067 \\
+0.00198 \\
-0.00964
\end{array} \right]_{(o, R)}](../../_images/math/3b90a8c86187e30e9880a342f7c8cb020b47e237.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
+0.000232177 & +0.000026659 & +0.000059566 \\
+0.000026659 & +0.000296598 & -0.000002851 \\
-0.000059566 & -0.000002851 & +0.000427637
\end{array}\right]_R](../../_images/math/0c7f739425f7e179892b93a0bbcaa624a07b9b0a.png)
![\text{CoM(S)} = \left[\begin{array}{c}
+0.07856 \\
+0.00603 \\
-0.04513
\end{array} \right]_{(o, R)}](../../_images/math/71a5221294fb56e2d28110f506cfd5b2ab5a80b4.png)