Legend
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.
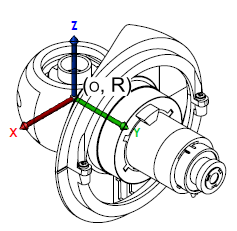
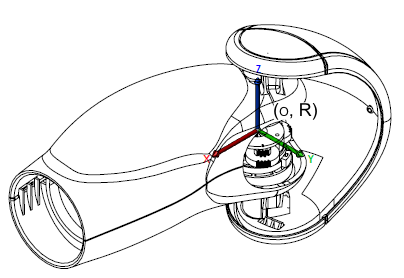
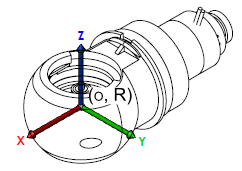
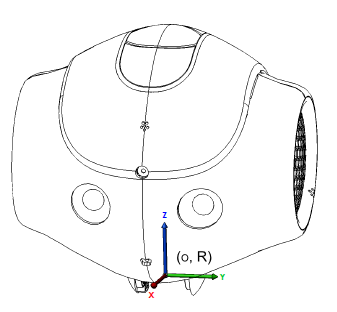
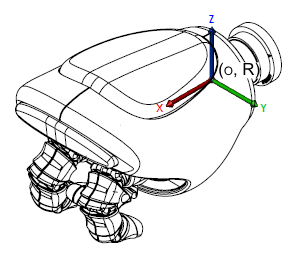
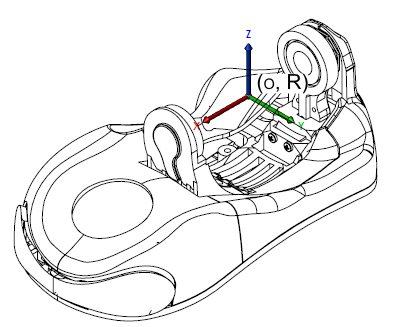
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
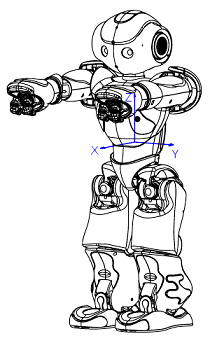
All solids (S) and local coordinate system are described relative to the zero posture: standing with straight legs and arms pointing forwards.
Arms
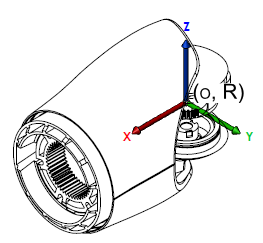
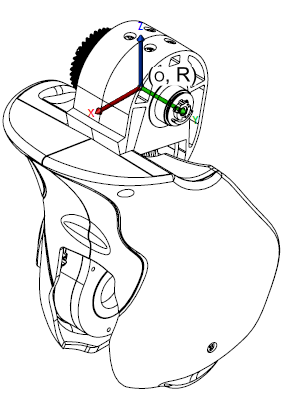
Right Shoulder
(o, R) is located on the joint: RShoulderPitch.
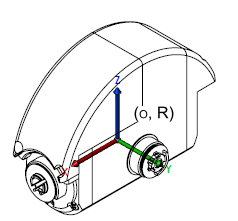
Left Shoulder
(o, R) is located on the joint: LShoulderPitch.
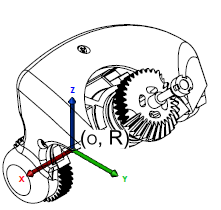
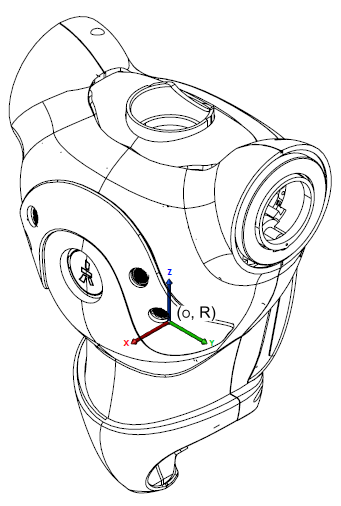
Right Bicep
(o, R) is located on the joint: RShoulderRoll.
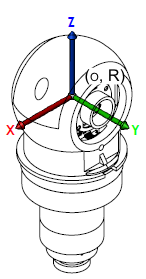
Left Bicep
(o, R) is located on the joint: LShoulderRoll.
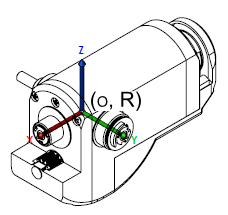
Right Elbow
(o, R) is located on the joint: RElbowYaw.
Left Elbow
(o, R) is located on the joint: LElbowYaw.
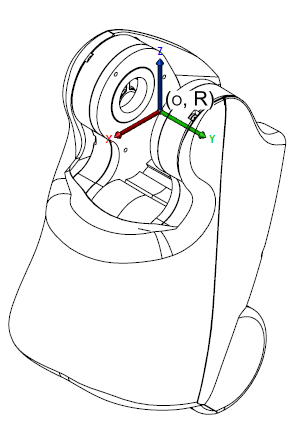
Right Motorized ForeArm
(o, R) is located on the joint: RElbowRoll.
Left Motorized ForeArm
(o, R) is located on the joint: LElbowRoll.
Legs
Right Pelvis
(o, R) is located on the joint: RHipYawPitch.
Left Pelvis
(o, R) is located on the joint: LHipYawPitch.
Right Hip
(o, R) is located on the joint: RHipRoll.
Left Hip
(o, R) is located on the joint: LHipRoll.
Right Thigh
(o, R) is located on the joint: RHipPitch.
Left Thigh
(o, R) is located on the joint: LHipPitch.
Right Tibia
(o, R) is located on the joint: RKneePitch.
Left Tibia
(o, R) is located on the joint: LKneePitch.
Right Ankle
(o, R) is located on the joint: RAnklePitch.
Left Ankle
(o, R) is located on the joint: LAnklePitch.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00415 \\
+0.00000 \\
+0.04258
\end{array}
\right]_{(o, R)}](../../_images/math/98a86b8eab67fd7fb57636a16a5ee04b7bc0693e.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00496741976 & +0.00001247398 & +0.00016446814 \\
+0.00001247398 & +0.00479135246 & -0.00002477669 \\
+0.00016446814 & -0.00002477669 & +0.00159784829
\end{array}
\right]_R](../../_images/math/22a17a3fbc35761b44eafbab03572291380c8b98.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00002 \\
+0.00000 \\
-0.02556
\end{array}
\right]_{(o, R)}](../../_images/math/8089e4656298aa39e822a478a1250f9cd94e065d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006180308 & -0.00000000205 & -0.00000004948 \\
-0.00000000205 & +0.00006281859 & -0.00000005067 \\
-0.00000004948 & -0.00000005067 & +0.00000543977
\end{array}
\right]_R](../../_images/math/e09ddb7915d4c1af6dd734c80b6491b840780f35.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00120 \\
-0.00000 \\
+0.05353
\end{array}
\right]_{(o, R)}](../../_images/math/b88cb46b4a00ebdcc489bdf9485cc05393963cac.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00226587004 & +0.00000787181 & -0.00001192653 \\
+0.00000787181 & +0.00226420513 & -0.00000231846 \\
-0.00001192653 & -0.00000231846 & +0.00087373321
\end{array}
\right]_R](../../_images/math/2bef3f53c21bfdd281184d560963a5c42365e2e0.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
+0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/270500c2f7991530f9d4a2e1dea8e434ad01e633.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & +0.00000202467 & +0.00000001722 \\
+0.00000202467 & +0.00001405799 & -0.00000000841 \\
+0.00000001722 & -0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/11994c7b7109edebadbc2d0881e395425234042e.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
-0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/5e3922dea4cb2365e8c8d49ef397cbc6a6c2bb87.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & -0.00000202467 & +0.00000001722 \\
-0.00000202467 & +0.00001405799 & +0.00000000841 \\
+0.00000001722 & +0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/5b9c56e8ad70cb494ee9928222db4ccfd6cdd0d1.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
-0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/00632e355154a46e915720a711a948e256bcd04f.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & +0.00003978057 & -0.00000752601 \\
+0.00003978057 & +0.00029001445 & +0.00000152945 \\
-0.00000752601 & +0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/b024275c3c42e9830bb754b06d23cbde9137e5f8.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
+0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/75c16ba7ae71f5584ab078846348d32f4ea6539d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & -0.00003978057 & -0.00000752601 \\
-0.00003978057 & +0.00029001445 & -0.00000152945 \\
-0.00000752601 & -0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/021b47c7e40e314643dd89526c9bae466afabab3.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
+0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/d13c7fbd6739165970ae23a1d9c799f4448f4203.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & +0.00000002243 & +0.00000001534 \\
+0.00000002243 & +0.00006225405 & -0.00000000559 \\
+0.00000001534 & -0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/9c00946250edc65bad2784d43b99c0deeabf06ef.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
-0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/b3cc0a55da083d1b7a0c7c592d0a8310130b94ce.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & -0.00000002243 & +0.00000001534 \\
-0.00000002243 & +0.00006225405 & +0.00000000559 \\
+0.00000001534 & +0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/fba0d21a5ae775bee9b038db09de9c9e70800d9a.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
-0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/79378d1a38a9f1c96fe3803c3da1f70576bfd890.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & +0.00000216293 & -0.00000071846 \\
+0.00000216293 & +0.00008890315 & +0.00000010809 \\
-0.00000071846 & +0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/a2fd62973ded3fe12100cf3c84c11daaacf4360c.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
+0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/78ddf1682a147a1f82eeb363039b317e3941c43b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & -0.00000216293 & -0.00000071846 \\
-0.00000216293 & +0.00008890315 & -0.00000010809 \\
-0.00000071846 & -0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/124f48cf25e6d2f3cdea8d5e96aa91eb467f5051.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.03180 \\
-0.00083\\
+0.00477
\end{array}
\right]_{(o, R)}](../../_images/math/93b1c0f5aced592378ec73edd5bba093174bad09.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006105675 & +0.00000503640 & -0.00003895369 \\
+0.00000503640 & +0.00027947351 & +0.00000293076 \\
-0.00003895369 & +0.00000293076 & +0.00027998803
\end{array}
\right]_R](../../_images/math/41b4c47d830c1f5af3529f1565264e783eec0743.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.03180 \\
+0.00083\\
+0.00477
\end{array}
\right]_{(o, R)}](../../_images/math/84efd758ae6e6155defdbe7b3f4c21f51239fba3.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006105675 & -0.00000503640 & -0.00003895369 \\
-0.00000503640 & +0.00027947351 & -0.00000293076 \\
-0.00003895369 & -0.00000293076 & +0.00027998803
\end{array}
\right]_R](../../_images/math/3c2ea08a4cdcacb8dfe86e59d01c64b164f541f6.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00766 \\
+0.01200 \\
+0.02717
\end{array}
\right]_{(o, R)}](../../_images/math/12df52038eb79a20616e098e74dfc42726e53849.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008997164 & +0.00000500214 & +0.00001273548 \\
+0.00000500214 & +0.00010552250 & -0.00002770075 \\
+0.00001273548 & -0.00002770075 & +0.00006688382
\end{array}
\right]_R](../../_images/math/2f63f18ceff9dd99367968e890107acf1ac50a22.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00766 \\
-0.01200 \\
+0.02717
\end{array}
\right]_{(o, R)}](../../_images/math/bc445e6b02280b40f6efce9cddd00dced816d679.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008997164 & -0.00000500214 & +0.00001273548 \\
-0.00000500214 & +0.00010552250 & +0.00002770075 \\
+0.00001273548 & +0.00002770075 & +0.00006688382
\end{array}
\right]_R](../../_images/math/2f732f0e5796b2671628af05ce42c2ae55f3d77d.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01649 \\
-0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/c8a5dd03391921a8dbb639b99a188e639dd45dee.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002791129 & -0.00000004765 & -0.00000530958 \\
-0.00000004765 & +0.00010146847 & -0.00000000007 \\
-0.00000530958 & -0.00000000007 & +0.00009209165
\end{array}
\right]_R](../../_images/math/d4c7aac088c3b2cfae78d66e7a0f6073442125ec.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.01649 \\
+0.00029 \\
-0.00475
\end{array}
\right]_{(o, R)}](../../_images/math/02af4f02a11c5ab1d45681e6ba10376ca81a1846.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002791129 & +0.00000004765 & -0.00000530958 \\
+0.00000004765 & +0.00010146847 & +0.00000000007 \\
-0.00000530958 & +0.00000000007 & +0.00009209165
\end{array}
\right]_R](../../_images/math/f0f99f491f8f423654c8b240a1b3185ee4667c0d.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00132 \\
-0.00235 \\
-0.05352
\end{array}
\right]_{(o, R)}](../../_images/math/c66be4b362976f40ffea1b81884edc313edce666.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00163011959 & -0.00000031939 & +0.00008287048 \\
-0.00000031939 & +0.00159269948 & -0.00004333919 \\
+0.00008287048 & -0.00004333919 & +0.00030120888
\end{array}
\right]_R](../../_images/math/3609e276277b8f389a573c50ad4d0f2b3370fc01.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00132 \\
+0.00235 \\
-0.05352
\end{array}
\right]_{(o, R)}](../../_images/math/fb1f03b07c37381e70378008c6105ddc3aa04195.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00163011959 & +0.00000031939 & +0.00008287048 \\
+0.00000031939 & +0.00159269948 & +0.00004333919 \\
+0.00008287048 & +0.00004333919 & +0.00030120888
\end{array}
\right]_R](../../_images/math/eb264526809288a52ba0ccb43b1b2f050d6afd16.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00422 \\
-0.00252 \\
-0.04868
\end{array}
\right]_{(o, R)}](../../_images/math/839d102023ab6c9965ddecb9e128f0a72f9a3a90.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00115382550 & -0.00000077529 & +0.00003231279 \\
-0.00000077529 & +0.00110377729 & -0.00004396728 \\
+0.00003231279 & -0.00004396728 & +0.00018861038
\end{array}
\right]_R](../../_images/math/52dcfd5f0b9cdc4d9148274f84dfabb5df52d56b.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00422 \\
+0.00252 \\
-0.04868
\end{array}
\right]_{(o, R)}](../../_images/math/fa2e4f7250a07685ca0ae7bba88c9efe54fdbf64.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00115382550 & +0.00000077529 & +0.00003231279 \\
+0.00000077529 & +0.00110377729 & +0.00004396728 \\
+0.00003231279 & +0.00004396728 & +0.00018861038
\end{array}
\right]_R](../../_images/math/064033dbdbd502aac05c6cfd694aa88cb47bffe0.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00142 \\
-0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/5dd249612947d88f779872cda197bb97ea63fa35.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00003882614 & +0.00000004711 & +0.00000221327 \\
+0.00000004711 & +0.00007211571 & -0.00000000686 \\
+0.00000221327 & -0.00000000686 & +0.00005352041
\end{array}
\right]_R](../../_images/math/75da265c4bf6aef7a054aaf7028ee57751d7b6c3.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00142 \\
+0.00028 \\
+0.00638
\end{array}
\right]_{(o, R)}](../../_images/math/9d264d907a033798531d697e1d7129bcf837549f.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00003882614 & -0.00000004711 & +0.00000221327 \\
-0.00000004711 & +0.00007211571 & +0.00000000686 \\
+0.00000221327 & +0.00000000686 & +0.00005352041
\end{array}
\right]_R](../../_images/math/0b56de7e3a1fe36da102c9879c985e9f4ae04e6b.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02540 \\
-0.00332 \\
-0.03241
\end{array}
\right]_{(o, R)}](../../_images/math/7257034c4bd5233bf74e9d0706c088fedf05c96e.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00026961204 & +0.00000587690 & +0.00013924446 \\
+0.00000587690 & +0.00064387818 & -0.00001887096 \\
+0.00013924446 & -0.00001887096 & +0.00052519167
\end{array}
\right]_R](../../_images/math/776ea1e1ddd5a22e13df04b97c4b0c3ad3a2dfee.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02540 \\
+0.00332 \\
-0.03241
\end{array}
\right]_{(o, R)}](../../_images/math/b071a57b72730b0b42aa26aad5a6f1a90c406495.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00026961204 & -0.00000587690 & +0.00013924446 \\
-0.00000587690 & +0.00064387818 & +0.00001887096 \\
+0.00013924446 & +0.00001887096 & +0.00052519167
\end{array}
\right]_R](../../_images/math/30e41e89f8c3de29acc5d846c2840fa60da0838c.png)