T14 - Masses - V3.3¶
Warning
The Masses as well as the Center of Mass positions taken in account in the robot models have been updated in order to remove the slight dissymmetry between left and right limbs.
Legend¶
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)
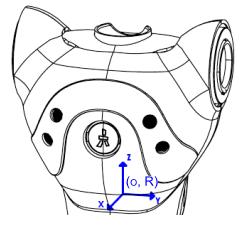
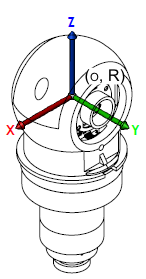
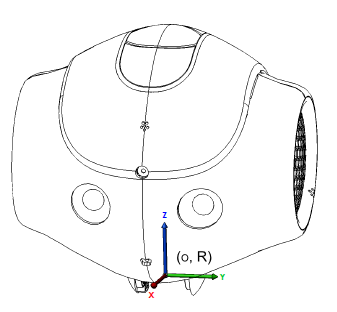
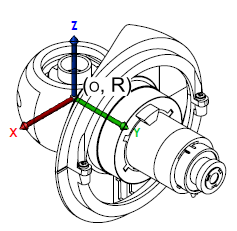
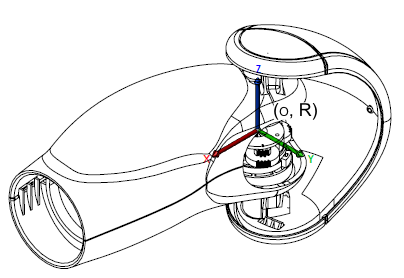
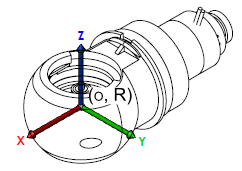
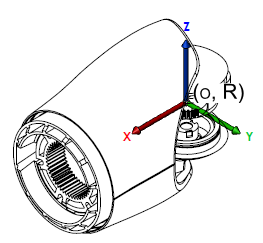
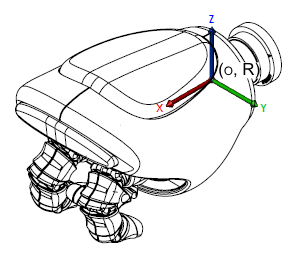
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: with straight arms pointing forwards.
Whole robot¶


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00544 \\
0.00000 \\
-0.01049
\end{array}
\right]_{(o, R)}](../../_images/math/6bb8d0fa6aed7ad025eeb2fd256c5db6828b13d7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00407798983 & 0.00001905036 & -0.00009699419 \\
0.00001905036 & 0.00383666587 & -0.00000729520 \\
-0.00009699419 & -0.00000729520 & 0.00191346075 \\
\end{array}
\right]_R](../../_images/math/41a0ae19609665a785b43ad95709738f1d731b27.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00002 \\
+0.00000 \\
-0.02556
\end{array}
\right]_{(o, R)}](../../_images/math/8089e4656298aa39e822a478a1250f9cd94e065d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006180308 & -0.00000000205 & -0.00000004948 \\
-0.00000000205 & +0.00006281859 & -0.00000005067 \\
-0.00000004948 & -0.00000005067 & +0.00000543977
\end{array}
\right]_R](../../_images/math/e09ddb7915d4c1af6dd734c80b6491b840780f35.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.00120 \\
-0.00000 \\
+0.05353
\end{array}
\right]_{(o, R)}](../../_images/math/b88cb46b4a00ebdcc489bdf9485cc05393963cac.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00226587004 & +0.00000787181 & -0.00001192653 \\
+0.00000787181 & +0.00226420513 & -0.00000231846 \\
-0.00001192653 & -0.00000231846 & +0.00087373321
\end{array}
\right]_R](../../_images/math/2bef3f53c21bfdd281184d560963a5c42365e2e0.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
+0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/270500c2f7991530f9d4a2e1dea8e434ad01e633.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & +0.00000202467 & +0.00000001722 \\
+0.00000202467 & +0.00001405799 & -0.00000000841 \\
+0.00000001722 & -0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/11994c7b7109edebadbc2d0881e395425234042e.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00178 \\
-0.02496 \\
+0.00018
\end{array}
\right]_{(o, R)}](../../_images/math/5e3922dea4cb2365e8c8d49ef397cbc6a6c2bb87.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00007102499 & -0.00000202467 & +0.00000001722 \\
-0.00000202467 & +0.00001405799 & +0.00000000841 \\
+0.00000001722 & +0.00000000841 & +0.00007316600
\end{array}
\right]_R](../../_images/math/5b9c56e8ad70cb494ee9928222db4ccfd6cdd0d1.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
-0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/00632e355154a46e915720a711a948e256bcd04f.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & +0.00003978057 & -0.00000752601 \\
+0.00003978057 & +0.00029001445 & +0.00000152945 \\
-0.00000752601 & +0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/b024275c3c42e9830bb754b06d23cbde9137e5f8.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.01885 \\
+0.00577 \\
+0.00065
\end{array}
\right]_{(o, R)}](../../_images/math/75c16ba7ae71f5584ab078846348d32f4ea6539d.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00008228413 & -0.00003978057 & -0.00000752601 \\
-0.00003978057 & +0.00029001445 & -0.00000152945 \\
-0.00000752601 & -0.00000152945 & +0.00026842331
\end{array}
\right]_R](../../_images/math/021b47c7e40e314643dd89526c9bae466afabab3.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
+0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/d13c7fbd6739165970ae23a1d9c799f4448f4203.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & +0.00000002243 & +0.00000001534 \\
+0.00000002243 & +0.00006225405 & -0.00000000559 \\
+0.00000001534 & -0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/9c00946250edc65bad2784d43b99c0deeabf06ef.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
-0.02560 \\
-0.00001 \\
-0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/b3cc0a55da083d1b7a0c7c592d0a8310130b94ce.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00000550319 & -0.00000002243 & +0.00000001534 \\
-0.00000002243 & +0.00006225405 & +0.00000000559 \\
+0.00000001534 & +0.00000000559 & +0.00006325124
\end{array}
\right]_R](../../_images/math/fba0d21a5ae775bee9b038db09de9c9e70800d9a.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
-0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/79378d1a38a9f1c96fe3803c3da1f70576bfd890.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & +0.00000216293 & -0.00000071846 \\
+0.00000216293 & +0.00008890315 & +0.00000010809 \\
-0.00000071846 & +0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/a2fd62973ded3fe12100cf3c84c11daaacf4360c.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.02556 \\
+0.00273 \\
+0.00096
\end{array}
\right]_{(o, R)}](../../_images/math/78ddf1682a147a1f82eeb363039b317e3941c43b.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00002519483 & -0.00000216293 & -0.00000071846 \\
-0.00000216293 & +0.00008890315 & -0.00000010809 \\
-0.00000071846 & -0.00000010809 & +0.00008686867
\end{array}
\right]_R](../../_images/math/124f48cf25e6d2f3cdea8d5e96aa91eb467f5051.png)

![\text{CoM(S)} = \left[
\begin{array}{c}
+0.03180 \\
-0.00083\\
+0.00477
\end{array}
\right]_{(o, R)}](../../_images/math/93b1c0f5aced592378ec73edd5bba093174bad09.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006105675 & +0.00000503640 & -0.00003895369 \\
+0.00000503640 & +0.00027947351 & +0.00000293076 \\
-0.00003895369 & +0.00000293076 & +0.00027998803
\end{array}
\right]_R](../../_images/math/41b4c47d830c1f5af3529f1565264e783eec0743.png)
![\text{CoM(S)} = \left[
\begin{array}{c}
+0.03180 \\
+0.00083\\
+0.00477
\end{array}
\right]_{(o, R)}](../../_images/math/84efd758ae6e6155defdbe7b3f4c21f51239fba3.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
+0.00006105675 & -0.00000503640 & -0.00003895369 \\
-0.00000503640 & +0.00027947351 & -0.00000293076 \\
-0.00003895369 & -0.00000293076 & +0.00027998803
\end{array}
\right]_R](../../_images/math/3c2ea08a4cdcacb8dfe86e59d01c64b164f541f6.png)