T14 - Masses - V3.2¶
Warning
The Masses as well as the Center of Mass positions taken in account in the robot models have been updated in order to remove the slight dissymmetry between left and right limbs.
Legend¶
This page details, for each solid (S) of a robot, the Mass, Center of Mass and Inertial matrix.

![\text{CoM(S)} = \left[\begin{array}{c}
X_G \\ Y_G \\ Z_G
\end{array} \right]_{(o, R)} \text{(m)}](../../_images/math/c10f44e2029ff9389e41eed6a5f380c4ba542843.png)
![\left[I_o(S)\right]_R = \left[\begin{array}{ccc}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{array}\right]_R (\text{kg}*\text{m}^2)](../../_images/math/00ce03166e8c671b404f890782379858e282c886.png)
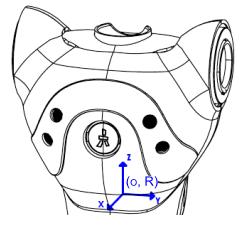
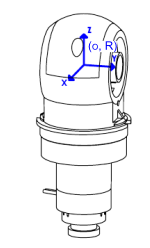
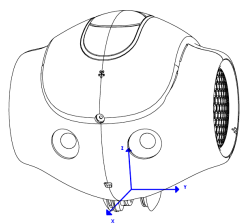
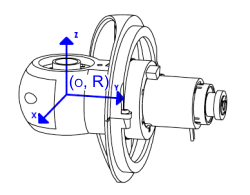
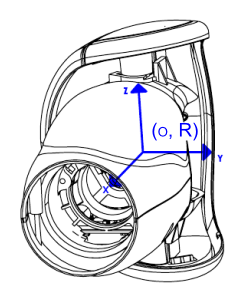
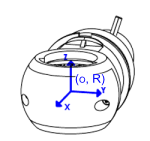
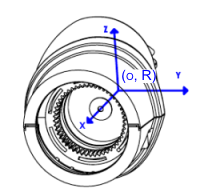
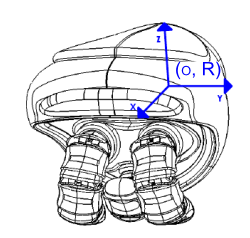
The Center of Mass position and the Inertial matrix are described relative to the local coordinate system of the current solid (S) (o, R).
All solids (S) and local coordinate system are described relative to the zero posture: with straight arms pointing forwards.
Whole robot¶


![\text{CoM(S)} = \left[
\begin{array}{c}
-0.00544 \\
0.00000 \\
-0.01049
\end{array}
\right]_{(o, R)}](../../_images/math/6bb8d0fa6aed7ad025eeb2fd256c5db6828b13d7.png)
![\left[I_o(S)\right]_R = \left[
\begin{array}{ccc}
0.00407798983 & 0.00001905036 & -0.00009699419 \\
0.00001905036 & 0.00383666587 & -0.00000729520 \\
-0.00009699419 & -0.00000729520 & 0.00191346075 \\
\end{array}
\right]_R](../../_images/math/41a0ae19609665a785b43ad95709738f1d731b27.png)

![CoM(S) = \left[
\begin{array}{c}
-0.00003 \\
+0.00000 \\
-0.02573
\end{array}
\right]_{(o, R)}](../../_images/math/f6572cb412a68c0e2406099bf4d4c07664d7d9f8.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00006223368 & -0.00000000042 & -0.00000007448 \\
-0.00000000042 & +0.00006324431 & -0.00000010416 \\
-0.00000007448 & -0.00000010416 & +0.00000549462
\end{array}
\right]_R](../../_images/math/114eebe9698912f2efa036ce0dba06d5c151a0c4.png)

![CoM(S) = \left[
\begin{array}{c}
+0.00383 \\
-0.00000 \\
+0.05156
\end{array}
\right]_{(o, R)}](../../_images/math/6f16221cba4de9cb83346420298aed78f0e9cd95.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00208895741 & -0.00000549094 & -0.00011339950 \\
-0.00000549094 & +0.00193222263 & +0.00002803917 \\
-0.00011339950 & +0.00002803917 & +0.00082257793
\end{array}
\right]_R](../../_images/math/85f1ddd946ff2cc3a9b6da53fa501a6c7b09d478.png)

![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
+0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/748f253a7dcb9d8b52661e631190041b7e8a503b.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & +0.00000202458 & +0.00000001713 \\
+0.00000202458 & +0.00001404920 & +0.00000004410 \\
+0.00000001713 & +0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/7f7b42d16312733e441434b8bb3da447419f55c7.png)
![CoM(S) = \left[
\begin{array}{c}
-0.00178 \\
-0.02507 \\
+0.00019
\end{array}
\right]_{(o, R)}](../../_images/math/f383823936225ba4a69862872e82ebbb1e3bf68e.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00007101854 & -0.00000202458 & +0.00000001713 \\
-0.00000202458 & +0.00001404920 & -0.00000004410 \\
+0.00000001713 & -0.00000004410 & +0.00007314467
\end{array}
\right]_R](../../_images/math/57b986235cf14712f3c1a6f8c27c9ca5c6714892.png)

![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
-0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/3f98bcd8cee4ac543e448061037b099b1086d6be.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & +0.00000193929 & -0.00001564503 \\
+0.00000193929 & +0.00020221058 & +0.00000368731 \\
-0.00001564503 & +0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/866ee18dfce0dcadd9444f3642437d8c69986ed3.png)
![CoM(S) = \left[
\begin{array}{c}
+0.02067 \\
+0.00388 \\
+0.00362
\end{array}
\right]_{(o, R)}](../../_images/math/10029fe2c70da3de3ec41152c655a88338709fe5.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005931793 & -0.00000193929 & -0.00001564503 \\
-0.00000193929 & +0.00020221058 & -0.00000368731 \\
-0.00001564503 & -0.00000368731 & +0.00018421556
\end{array}
\right]_R](../../_images/math/a156f27f55609d934c81fee583c76aae17285e96.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
+0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/05289c9c06d66e1e096403e67bf0a80cc80b03c1.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & +0.00000002242 & +0.00000006771 \\
+0.00000002242 & +0.00006224789 & -0.00000000559 \\
+0.00000006771 & -0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/9b2006737b04702885a571c5d35f7328f2be8f87.png)
![CoM(S) = \left[
\begin{array}{c}
-0.02573 \\
-0.00001 \\
-0.00020
\end{array}
\right]_{(o, R)}](../../_images/math/59a40e56b8855a51111f9a838334c8248bec4b74.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00000549462 & -0.00000002242 & +0.00000006771 \\
-0.00000002242 & +0.00006224789 & +0.00000000559 \\
+0.00000006771 & +0.00000000559 & +0.00006323010
\end{array}
\right]_R](../../_images/math/a4d60b5c61cc5d548caea3f3bd9efbebc615df6f.png)

![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
-0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/50691ebaf96e5c87b4408c790f4fb13123a8085c.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & +0.00000131460 & -0.00000143626 \\
+0.00000131460 & +0.00003056901 & +0.00000020686 \\
-0.00000143626 & +0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/3bf4edbd0bce8b652c573f6de7f30a9de65f3e37.png)
![CoM(S) = \left[
\begin{array}{c}
+0.01940 \\
+0.00304 \\
+0.00250
\end{array}
\right]_{(o, R)}](../../_images/math/38ec04cf72c06330dbee80deba02dae29d66cae2.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00001271101 & -0.00000131460 & -0.00000143626 \\
-0.00000131460 & +0.00003056901 & -0.00000020686 \\
-0.00000143626 & -0.00000020686 & +0.00002976287
\end{array}
\right]_R](../../_images/math/06add495ec6f2d332a6843d1c7ad2a10eaef3932.png)

![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
-0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/0236b99f043b5838e9bb60aaa39fb6263a0e3764.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & +0.00000822213 & +0.00001136287 \\
+0.00000822213 & +0.00027230907 & -0.00000181780 \\
+0.00001136287 & -0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/0c10bdc93c79c1f4fba8406b67ccfb8d25bf501b.png)
![CoM(S) = \left[
\begin{array}{c}
+0.03241 \\
+0.00268 \\
-0.00272
\end{array}
\right]_{(o, R)}](../../_images/math/e8a914c3c7571be410f0f4cbd12f7f9ac94d9072.png)
![[I_O(S)]_R = \left[
\begin{array}{ccc}
+0.00005692620 & -0.00000822213 & +0.00001136287 \\
-0.00000822213 & +0.00027230907 & +0.00000181780 \\
+0.00001136287 & +0.00000181780 & +0.00026611399
\end{array}
\right]_R](../../_images/math/f7c3176fad0050f1546b33009a59462cf91edba6.png)