Using the Brake Release Keys¶
In normal use, Brakes are constantly protecting Pepper from the risk of tipping.
These Brakes limit the flexibility of Pepper leg.
You must deactivate the Brakes before packing Pepper.
- Brake Release keys
The Brake release keys allow you to deactivate Pepper Brakes.
Warning
Before inserting the Brake release keys:
- Make sure Pepper is OFF, and
- Always keep one hand on Pepper to ensure Pepper does not fall.
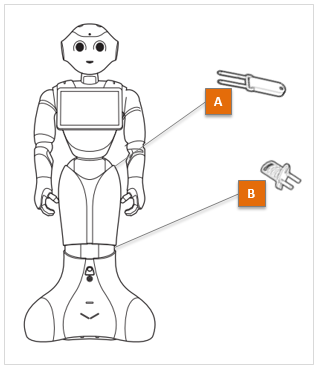
Part Name A Hip key B Knee key
Inserting the Brake Release Keys¶
Warning
In this procedure Pepper is in unstable equilibrium.
Always keep one hand on Pepper to ensure it does not fall.
| Step | Action |
|---|---|
| Make sure Pepper is OFF and in a Slumping or Standing posture. | |
Restrain Pepper from falling backwards or forwards. To do so, you may, for example:
|
|
| Insert the Knee Key until you reach the click and let Pepper fall slightly backward all the way. | |
| Insert the Hip Key fully. | |
Ensure the hip has gone back all the way, then push the torso forward and over the hip all the way. 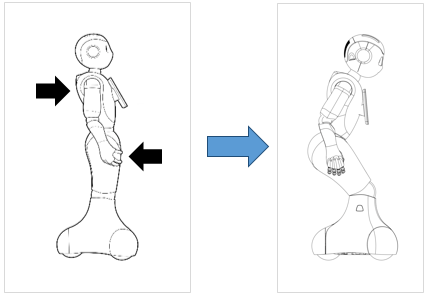
You may let go, Pepper is now in the Slumping posture. Note: Pepper torso may rock slightly sideways. This is not dangerous. |
Removing the Brake Release Keys¶
Warning
In this procedure Pepper is in unstable equilibrium. Always keep one hand on Pepper to ensure it does not fall.
| Step | Action |
|---|---|
| Make sure Pepper is in a Slumping or Standing posture. | |
| Stand behind Pepper. | |
Make sure Pepper is vertical. Adjust if necessary by feeling the correct upright posture. To do so, you may, for example:
|
|
| While keeping Pepper stable with one hand, remove the Hip Key. | |
| While keeping Pepper stable with one hand, remove the Knee Key. | |
Check Pepper does not lean forwards or backwards. Pepper should be stable without the keys. |
Brake release Key effect when Pepper is ON¶
Warning
Be very cautious: if one of the Brake Release keys are inserted at the Hip and / or the Knee level, be aware that the brakes are not anymore protecting the robot.
Always keep a hand on the hip and another on the shoulder of the robot in order to prevent any risk of falling.
Waking up action command has the regular effect.
Rest action command will cause the robot to bow. From the moment the robot is in rest with a brake release key, life status will be put to safeguard and will prevent from enabling life again, unless manually switching to “disabled” state first. For further details see: States.
While the robot is in rest with a brake release key, the shoulder LEDs will be blinking red, reporting a 710 error about the leg. For further details, see: Diagnosis - Pepper.
