Lasers¶
Specification¶
The robot is equipped with 6 laser line generators.
| Wavelength | 808 nm | 
|
| Mode of operation | pulsed | |
| Global shutter camera | ||
| Framerate | 6.25Hz per laser | |
| Auto-exposure control | ||
Location¶
Laser Sensors¶
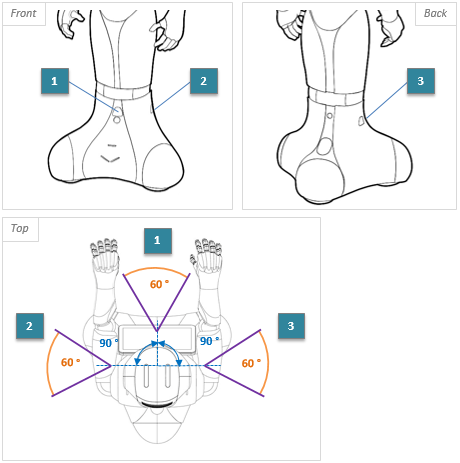
See the URDF files.
| Part | Name | VFOV | HFOV |
|---|---|---|---|
| 1 | LaserSensor/Front | 40 ° | 60 ° |
| 2 | LaserSensor/Left | ||
| 3 | LaserSensor/Right |
Laser Actuators - front ground evaluation¶
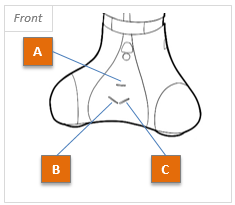
| Part | X(m) | Y(m) | Z(m) | WX(deg) | WY(deg) | WZ(deg) | Beam angle |
|---|---|---|---|---|---|---|---|
| A | 0.11290 | 0.00000 | -0.17550 | 0.0000 | 14.15000 | 0.0000 | 60 ° |
| B | 0.14020 | -0.03050 | -0.21380 | -32.5300 | 16.27000 | 30.2100 | |
| C | 0.14020 | 0.03050 | -0.21380 | 32.5300 | 16.27000 | -30.2100 |
To access values by using ALMemory key names, see: Shovel data (A), Vertical right data (B), Vertical left data (C).
Note
The Laser located on the front right (B) projects its line on the left side of the robot’s center (seen from a robot’s point of view).
The Laser located on the front left (C) projects its line to the right side of the robot’s center (seen from a robot’s point of view).
Laser Actuators – surroundings¶
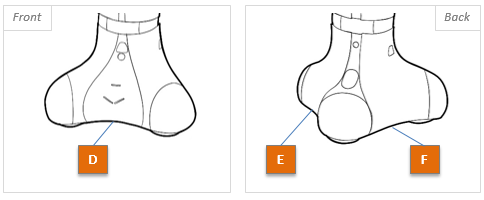
| Part | X(m) | Y(m) | Z(m) | WX(deg) | WY(deg) | WZ(deg) | Beam angle |
|---|---|---|---|---|---|---|---|
| D | 0.12960 | -0.02700 | -0.30010 | 0.00000 | 1.00000 | 0.00000 | 60 ° |
| E | -0.08600 | 0.10100 | -0.30000 | -1.00000 | 0.00000 | 90.0000 | |
| F | -0.08600 | -0.10100 | -0.30000 | 1.00000 | 0.00000 | -90.0000 |
To access values by using ALMemory key names, see: Front (D), Left (E), Right (F).