Effector & Chain definitions¶
This overview points out the relationship between the different names and specifies which model includes which joint:
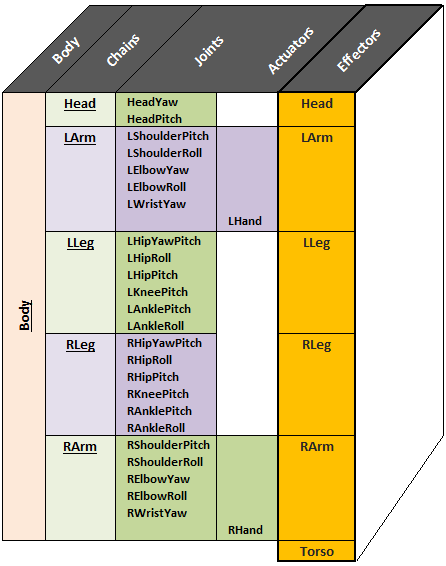
- Body = all Joints + the 2 Actuators added at the end of the arm links
- Chain = Joints + Actuators
- Effectors = all Chain names + Torso
Effectors¶
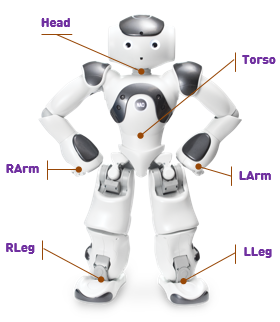
These Effector names are identical to the Chain name except for “Torso”.
| Effector name | Position | End transform |
|---|---|---|
| “Head” | At the neck joint | Position3D(0.0, 0.0, 0.0) |
| “LArm” | Inside the hand | Position3D(HandOffsetX, 0.0, -HandOffsetZ) |
| “LLeg” | Below the ankle | Position3D(0.0, 0.0, -FootHeight) |
| “RLeg” | Below the ankle | Position3D(0.0, 0.0, -FootHeight) |
| “RArm” | Inside the hand | Position3D(HandOffsetX, 0.0, -HandOffsetZ) |
| “Torso” | A reference point in the torso | Position3D(0.0, 0.0, 0.0) |
To see the position of Effectors, see: Links.
For further details, see: Effectors.
Chains¶
The table below lists the chains and all the joints included in each chain:
| Body is ... | Head + LArm + LLeg + RLeg + RArm | ||||
|---|---|---|---|---|---|
| The chain ... | Head | LArm | LLeg | RLeg | RArm |
involves the joints ... |
HeadYaw | LShoulderPitch | LHipYawPitch1 | RHipYawPitch1 | RShoulderPitch |
| HeadPitch | LShoulderRoll | LHipRoll | RHipRoll | RShoulderRoll | |
| LElbowYaw | LHipPitch | RHipPitch | RElbowYaw | ||
| LElbowRoll | LKneePitch | RKneePitch | RElbowRoll | ||
| LWristYaw | LAnklePitch | RAnklePitch | RWristYaw | ||
| LHand | RAnkleRoll | LAnkleRoll | RHand | ||
Note
1 LHipYawPitch and RHipYawPitch share the same motor so they move simultaneously and symmetrically. In case of conflicting orders, LHipYawPitch always takes the priority.
The group “Body” addresses all the joints of the robot.
It is possible to get the list of joints available on your robot using the
ALMotionProxy::getBodyNames method, described in the section:
Case 2: Programmatic access to Joint Names.
Joint range and direction¶
For further details, see: “Body”, chains and joint names.