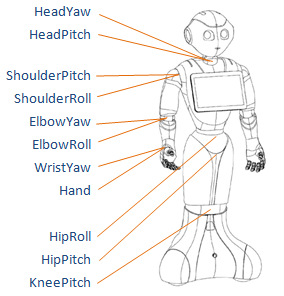
Joints¶
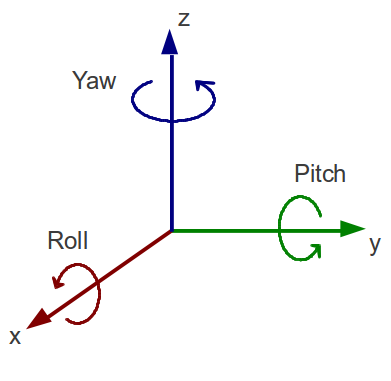
Sign convention¶
Given a joint that links two body parts of the robot, the body part that is closer to the trunk is considered to be fixed and the body part that is farther from the trunk is the one that rotates around the joint axis.
To perform the rotation of the body parts, we place a frame at each joint. When the robot is at the zero pose, all joint frames have the same orientation. Then, roll rotations take place around the X axis, pitch rotations around the Y axis and yaw rotations around the Z axis.
Head joints¶
| Joint name | Motion (rotation axis) | Range (degrees) | Range (radians) |
|---|---|---|---|
| HeadYaw | Head joint twist (Z) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| HeadPitch | Head joint front and back (Y) | -40.5 to 25.5 | -0.7068 to 0.4451 |
| Click the joint name to see all related ALMemory key names. | |||
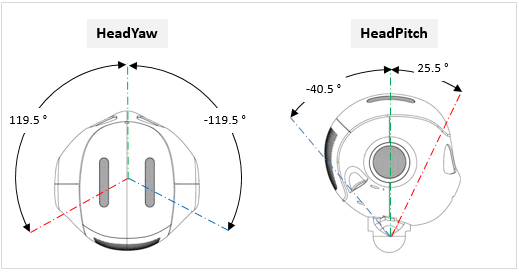
Due to collision with Robot casing and tablet, the head yaw and pitch are limited.
| HeadYaw (°) | HeadPitch - (°) | HeadPitch + (°) |
|---|---|---|
| -119.5 | -35.0 | 13.5 |
| -91.4 | -35.1 | 13.5 |
| -61.6 | -35.2 | 20.9 |
| -33.33 | -40.5 | 25.5 |
| 33.33 | -40.5 | 25.5 |
| 61.6 | -35.2 | 20.9 |
| 91.4 | -35.1 | 13.5 |
| 119.5 | -35.0 | 13.5 |
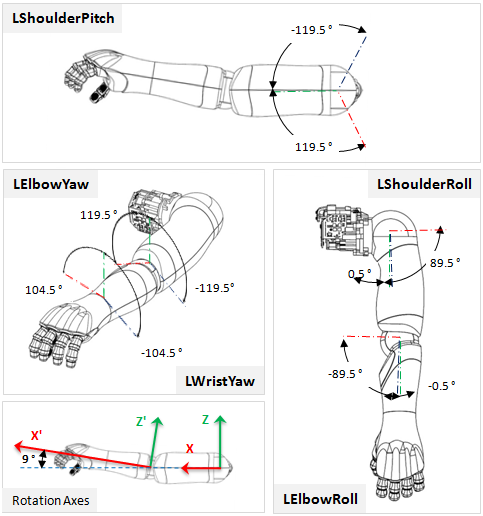
Left Arm joints and actuators¶
| Joint name | Motion (rotation axis) | Range (degrees) | Range (radians) |
|---|---|---|---|
| LShoulderPitch | Left shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LShoulderRoll | Left shoulder joint right and left (Z) | 0.5 to 89.5 | 0.0087 to 1.5620 |
| LElbowYaw | Left shoulder joint twist (X’) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| LElbowRoll | Left elbow joint (Z’) | -89.5 to -0.5 | -1.5620 to -0.0087 |
| LWristYaw | Left wrist joint (X’) | -104.5 to 104.5 | -1.8239 to 1.8239 |
| Click the joint name to see all related ALMemory key names. | |||
Due to collision, the LElbowRoll is limited.
| LElbowYaw (°) | LElbowRoll Min (°) | LElbowRoll Max (°) |
|---|---|---|
| -119.5 | -78.0 | -0.5 |
| -60.0 | -78.0 | -0.5 |
| 0.0 | -89.5 | -0.5 |
| 99.5 | -89.5 | -0.5 |
| 119.5 | -83.0 | -0.5 |
| Actuator name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| LHand | Left hand | Open and Close | Open and Close |
| Click the joint name to see all related ALMemory key names. | |||
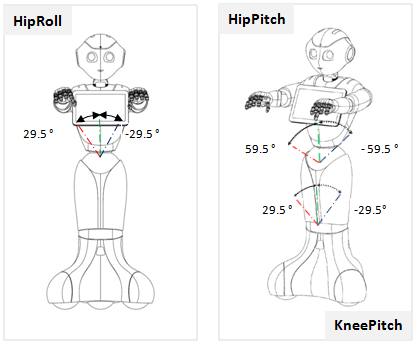
Leg joints¶
| Joint name | Motion (rotation axis) | Range (degrees) | Range (radians) |
|---|---|---|---|
| HipRoll | Hip joint right and left (X) | -29.5 to 29.5 | -0.5149 to 0.5149 |
| HipPitch | Hip joint front and back (Y) | -59.5 to 59.5 | -1.0385 to 1.0385 |
| KneePitch | Knee joint (Y) | -29.5 to 29.5 | -0.5149 to 0.5149 |
| Click the joint name to see all related ALMemory key names. | |||
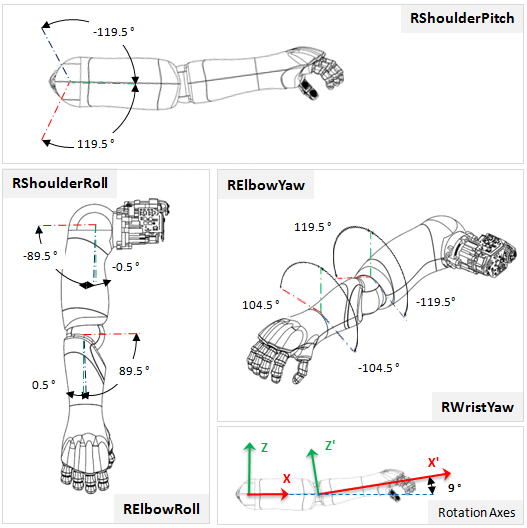
Right Arm joints and actuators¶
| Joint name | Motion (rotation axis) | Range (degrees) | Range (radians) |
|---|---|---|---|
| RShoulderPitch | Right shoulder joint front and back (Y) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RShoulderRoll | Right shoulder joint right and left (Z) | -89.5 to -0.5 | -1.5620 to -0.0087 |
| RElbowYaw | Right shoulder joint twist (X’) | -119.5 to 119.5 | -2.0857 to 2.0857 |
| RElbowRoll | Right elbow joint (Z’) | 0.5 to 89.5 | 0.0087 to 1.5620 |
| RWristYaw | Right wrist joint (X’) | -104.5 to 104.5 | -1.8239 to 1.8239 |
| Click the joint name to see all related ALMemory key names. | |||
Due to collision, the RElbowRoll is limited.
| RElbowYaw (°) | RElbowRoll Min (°) | RElbowRoll Max (°) |
|---|---|---|
| -119.5 | 0.5 | 83.0 |
| -99.5 | 0.5 | 89.5 |
| 0.0 | 0.5 | 89.5 |
| 60.0 | 0.5 | 78.0 |
| 119.5 | 0.5 | 78.0 |
| Actuator name | Motion | Range (degrees) | Range (radians) |
|---|---|---|---|
| RHand | Right hand | Open and Close | Open and Close |
| Click the joint name to see all related ALMemory key names. | |||